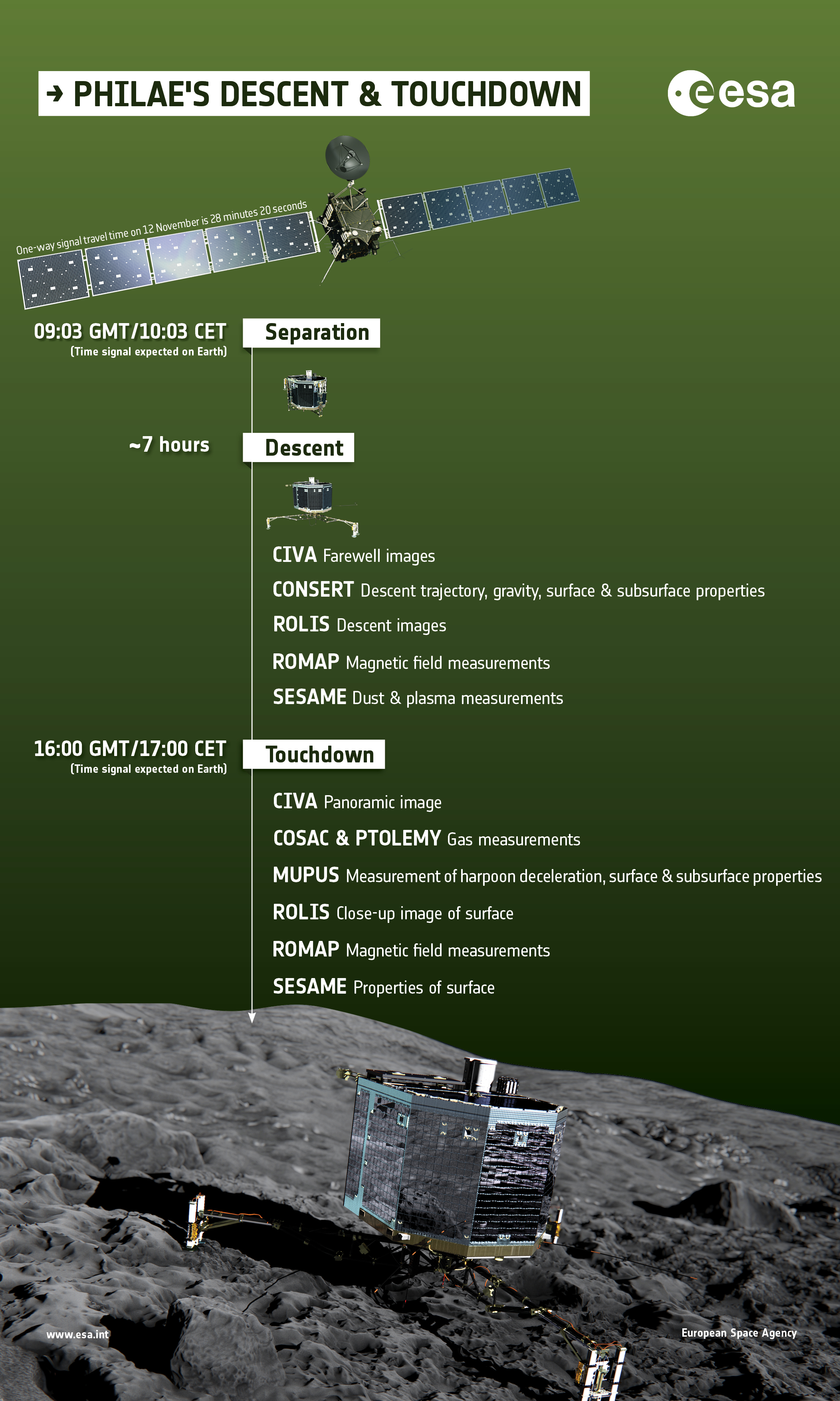
Podle blogu Institutu Maxe Plancka bude sekvence SDL (Separation, Descent, Landing) zahájena vypuštěním Philae ve výšce 2,5 km nad povrchem komety.
Behem sestupu už začnou první vědecká měření přístroji MUPUS, PP-SESAME, CONSERT, ROMAP a snímkování kamerami CIVA a ROLIS. Před dosednutím lander vystřelí ke kometě dvě harpuny, které mají zajistit pevné dosednutí a spojení s povrchem.
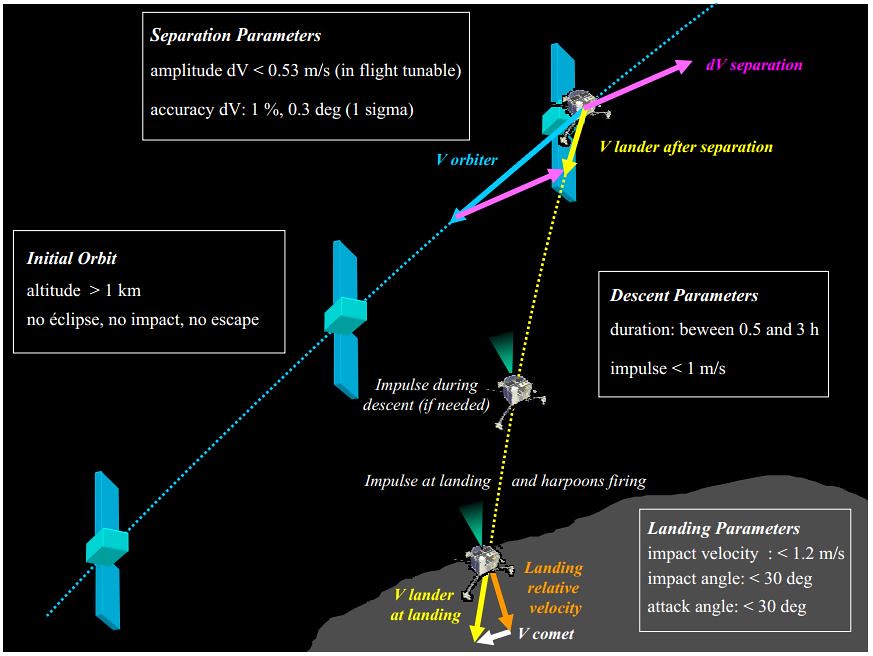
V této presentaci o SDL sekvenci Philae https://www.ffg.at/getdownload.php?id=2941 je i následující slajd, naznačující jak by mělo přistání proběhnout.
Některé údaje jsou ve schematu dost nepřesné, jako výška orbitu a doba sestupu, ale principiálně to snad bude podobné.
citace:Ano, Philae má v sobě zřejmě alespoň jeden gyroskop, který nazývají "flywheel".
Navíc ještě obsahuje ADS (Active Descent System), což je ta toroidní nádrž na stlačený plyn nad FlyWheel a jedna cold gass tryska na horní straně landeru, směřující vzhůru. Hlavní účel je tlačit lander dolů k povrchu při dosednutí, ale mohou jej využít i během sestupu.
fajn, takže můžou "krátit" dráhu + pootočit sondou před dosednutím. To půjde. Tedy bude záležet na kvalitě autopilota.
Otázka1: jak autopilot měří výšku a rychlost k povrchu?
Otázka2: jak autopilot pozná, že je potřeba krátit dráhu a použít plynovou trysku?
Otázka3: jak autopilot pozná pod jakým úhlem se k sondě nalézá povrch?
Podle mého názoru na Philae není žádný "autopilot". Směrování a počáteční orientaci Philae kompletně zajistí Rosetta. Po "vysazení" už modul Philae bude jen pasivně "padat" (a přitom fotit, pasivně stabilizován pomocí "flywheel" a případně předprogramovaně urychlen pomocí ADS). Předpokládám, že fotky nebudou autonomně využity k měření vzdálenosti od komety, ale že systémy Philae prostě jen zaregistrují "dopad" (dotek nožiček s povrchem komety). Po zaregistrování dopadu proběhnou další předprogramované akce (přidržení u povrchu pomocí ADS, zašroubování patek nožiček do povrchu, zaharpunování k povrchu, vyfocení panoramatu, ...).
Ono když tam není motor, tak není potřeba žádný autopilot. Stabilizaci zajistí gyroskop a o start "kotvící" sekvence potom dotykový senzor.Vše natvrdo nastavené.
Jediné, co by snad mohlo souviset s nějakou autopilotáží, je měření rychlosti sestupu pomocí přístroje CONSERT a v souvislosti s tím eventuální použití trysky ADS.
Určitě to nebude snadné, za 7 hodin vykoná kometa polovinu otáčky a pokud by lander padal volným pádem bez horizontální složky rychlosti bude padat do těžiště a to je někde v oblasti blízko krčku.
Rosetta dostala zelenou k přechodu na kruhový orbit 10 km pro fázi blízkého pozorování a měření (COP - Close Observation Phase).
Na kruhové dráze setrvá do 28.10. kdy přejde na eliptický orbit 10 - 30 km. Odtud 12.11. vysadí Philae ze vzdálenosti 22,5 km od středu komety.
Zajímavé manévry.
Přidávám odkaz na původní článek na blogu Rosetty http://blogs.esa.int/rosetta/2014/10/08/go-for-10-km/ a doplním z něj sem pár pro mne zajímavých detailů:
- kruhová dráha o poloměru cca 10 km má být dosažena 15.10.2014
- (28.10.2014 má sonda přejít na eliptickou dráhu s poloměrem cca 30 km [jak už psal Mirek])
- 12.11.2014, 2 hodiny před vypuštěním Philae, má Rosetta přejít na zatím blíže neupřesněnou dráhu a z ní ve výši cca 20 km uvolnit přistávací modul
- další detailnější informace související s přistáním na kometě 67P mají být k dispozici "brzy" ("soon")
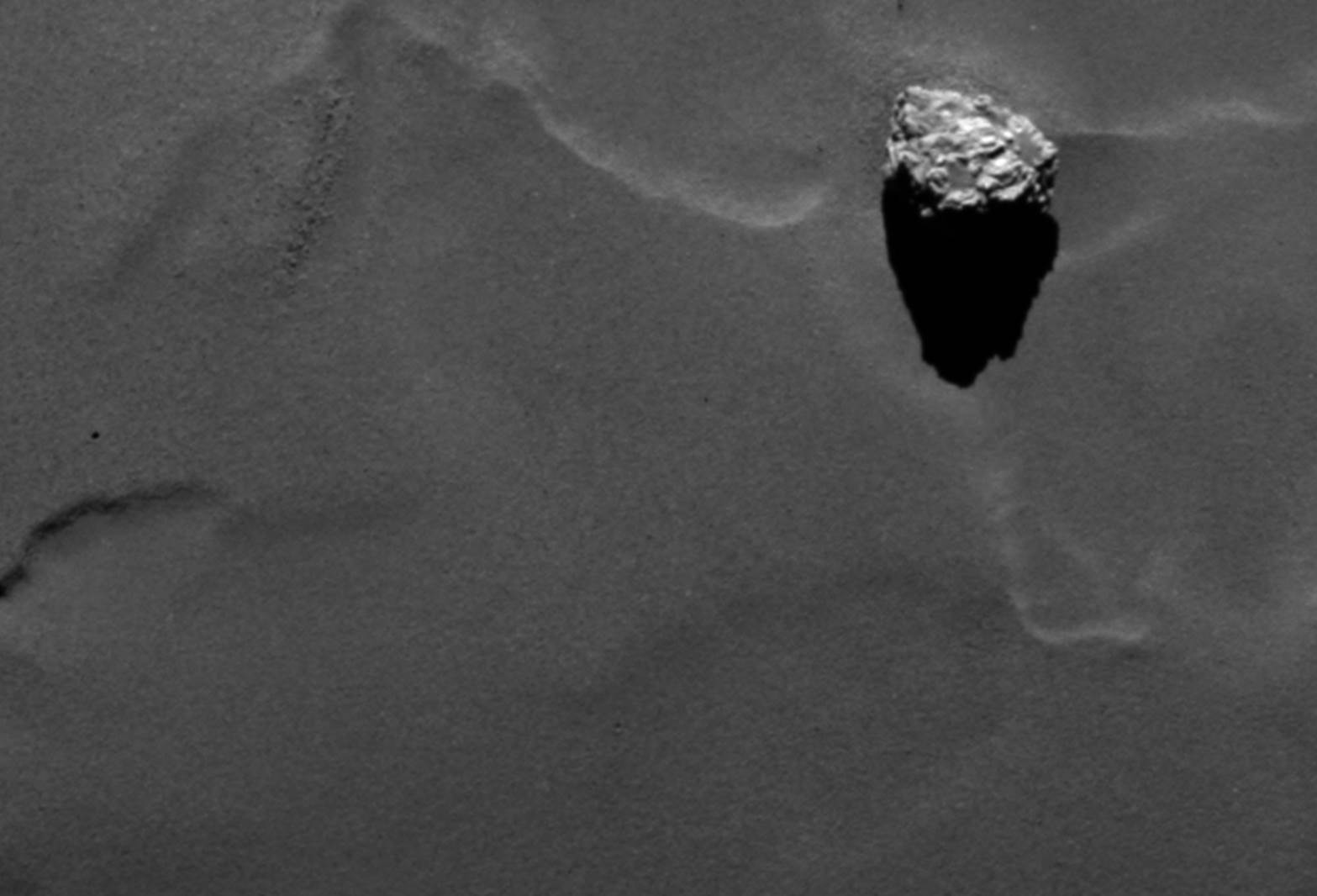
OSIRIS možná boduje, ale těžko se to dá posoudit, když vezmou originální obrázek, vystřihnou z něj část odpovídající ploše 6% originálního snímku a pak tento zbytek zvětší 2.5×, aby to nevypadalo trapně (jinak by totiž měl snímek jen nějakých 600×400 pixelů).
Z toho důvodu také v tomto zvětšeném obrázku odpovídá jeden pixel 20-ti cm. Nezvětšený originál má rozlišení 50 cm/pixel. [Upraveno 09.10.2014 Machi]
Takže je to jasné: celá sonda přejde na kolizní dráhu s jádrem komety a po oddělení landeru, který bude k jádru postupovat pasivně, se opět vrátí na orbitální dráhu kolem komety.
To ovšem znamená, že bod přistání bude v době zahájení přistávacích operací někde prostoru mimo kometu a jak lander, tak místo přistání na rotující kometě se k němu budou současně blížit.
Jestli se trefí do přistávací oblasti a současně bude sonda ve správné poloze, tak to bude malý zázrak a to předpokládám, že zachycovací operace proběhne správně a ve správném okamžiku.
citace:
To ovšem znamená, že bod přistání bude v době zahájení přistávacích operací někde prostoru mimo kometu a jak lander, tak místo přistání na rotující kometě se k němu budou současně blížit.
Tak ono to je tak vždycky, ať už se letí kamkoliv. Ta nebeské mechanika je vždy stejná, zrovna tak jako způsob navigace a orientace.
citace:Takže je to jasné: celá sonda přejde na kolizní dráhu s jádrem komety a po oddělení landeru, který bude k jádru postupovat pasivně, se opět vrátí na orbitální dráhu kolem komety..
nepojde o koliznu drahu, len o blizku koliznej drahe...
lander bude oddeleny "odskrutkovany" zavitovou tycou, ktora mu sucasne udeli pozadovanu rychlost.
ako vidiet z obrazku o par prispevkov vyssie od MP, vysledny smer landeru bude suctom tychto dvoch rychlosti... obeznej rychlosti rosetty a rychlosti oddelenia landeru. ( Rychlost oddelenia landeru je regulovatelna.)
takze na koliznu drahu sa dostane jedine lander. rosetta nie.
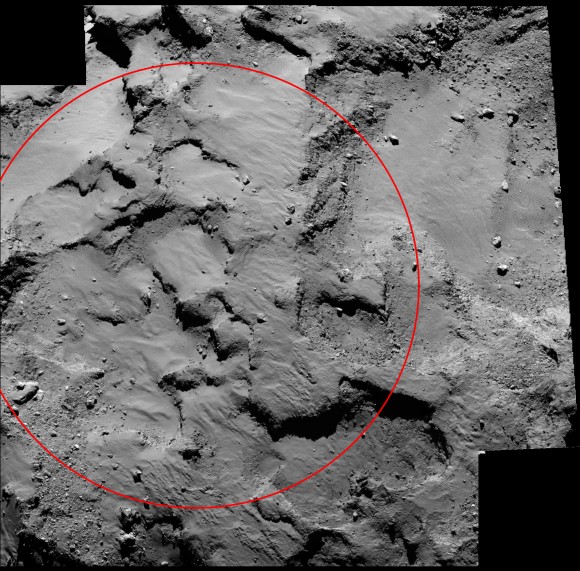
Dnes bylo oficiálně potvrzeno, že přistání Philae bude do primární oblasti "J" (na "hlavě" komety 67P). Bylo zveřejněno i pár dalších podrobností o manévrování před i po uvolnění Philae z Rosetty. V podstatě to odpovídá našim nedávno odhadnutým předpokladům. Jestli bude vypouštěcí dráha Rosetty kolizní nebo ne není zatím upřesněno, ale podle zveřejněného videa to vypadá, že přece jen dráha povede kousek kolem komety. Celkově jsou ty manévry fakt docela šílené. Takže držím palce, aby to všechno "klaplo". Do přistání zbývá ještě skoro měsíc.
Čím víc manévrů, tím větší pravděpodobnost chyby. Připomenu Hayabusu-1, ta manévrovala tak dlouho, až Minervu poslala na opačnou stranu. Na druhou stranu sedmihodinová přistávací sekvence umožňuje i nějaký zásah ze Země.
Kdo má zájem, může se zapojit do soutěže o návštěvu střediska ESA v Darmstadu během přistání Philae 12.listopadu.
Stačí navrhnout jméno místa přistání v lokalitě J, návrh musí být vybrán a navrhovatel vylosován. Hodně štěstí!
(já už svůj návrh podal)
citace:Kdo má zájem, může se zapojit do soutěže o návštěvu střediska ESA v Darmstadu během přistání Philae 12.listopadu.
Stačí navrhnout jméno místa přistání v lokalitě J, návrh musí být vybrán a navrhovatel vylosován. Hodně štěstí!
(já už svůj návrh podal)
citace:jednoznačně "Hector Servadac", jak jinak :-)
To by mohl být dobrý název pro lander, ale tady je řeč o místě, kam lander přistane... Navíc, ze soutěže jsou pravidly jednoznačně vyloučeny jména osob.
Are there any restrictions on the proposed name?
You can propose any name you like, but it cannot be named after a person, dead or alive. Mythological names with a commonly-known symbolic meaning will be considered....





 ji postnu ještě jednou.
ji postnu ještě jednou.