| 11.6.2021 - 13:00 - MiraH | |
|
citace 11.6.2021 - 06:59 - Ervé:
1. je panorama ještě přes sjetím dolů, dobře jsou vidět dva pásy odfouklé spalinami raketových motorů při přistání (viditelné i na snímku MRO 6.6.).
Přistávací motor směřuje dolů, takže by to nemělo být způsobené spalinami od přistávacího motoru. Prý je to způsobené dodatečným vypuštěním zbytku pohonných hmot, aby se zabránilo případnému výbuchu. Nevím, jak to technicky provedli. Na jednu stranu palivo a na druhou okysličovadlo? |
| 11.6.2021 - 20:07 - MiraH | |
|

Zdařilé panoráma virtuální reality je zde: https://720yun.com/t/d9vktq8wprm?scene_id=73950360
 
Zdalipak jste si všimli, že vedle čínské vlaječky na přistávacím modulu jsou vyobrazeni i maskoti zimních olympijských her pořádaných v Pekingu v roce 2022? Konkrétně to je maskot zimních olympijských her panda Bing Dwen Dwen (Bing Dun Dun) [Ping Tun Tun] a maskotem paralympijských her je červený lampion Shuey Ron Ron (Xue Rong Rong) [Süe žung žung].
V sobotu 12. června 2021 uspořádá Čínská národní kosmická agentura (CNSA) v Pekingu tiskovou konferenci, na které představí první čínskou průzkumnou misi na Mars Tianwen-1 [Tchien-wen 1] s vozítkem Zhurong [Ču-žung]. Pro nás to bude v nepříznivý čas ve 4:00 SELČ. Bude to v přímém přenosu, tak se zřejmě dočkáme ještě dalších zajímavostí. Podle zpráv 240 kilogramové vozítko Zhurong [Ču-žung] ujelo popojížděním po povrchu celkem 80 m.
http://www.cnsa.gov.cn/n6758823/n6758838/c6812128/content.html
[upraveno 11.6.2021 20:09] |
| 11.6.2021 - 23:19 - MiraH | |
|

Zdroj obrázku: (Credit: NASA/JPL/UArizona) https://www.uahirise.org/hipod/ESP_069665_2055
Na tomto snímku, který pořídila 6. června 2021 americká sonda MRO (Mars Reconnaissance Orbiter) kamerou HiRISE (High Resolution Imaging Science Experiment) z výšky 287 km, je dobře vidět okolí místa přistání sondy Tianwen-1 [Tchien-wen 1] včetně horního aerodynamického krytu s padákem a je možné jej porovnat se zveřejněným panoramatem. Je zajímavé, že blízký kráter na jihovýchodě na panoramatu není moc vidět a přitom je dost blízko. Je to holt planina. Alespoň to ozvláštňují ty duny.

Zdroj obrázku: (Credit: CNSA/PEC) http://www.cnsa.gov.cn/n6759533/c6812126/content.html
Pohled jihovýchodním směrem ke kráteru, jehož okraj lemují kameny. Za kráterem je vidět duna. [upraveno 11.6.2021 23:48] |
|
| Jsem moc rád, že rover jezdí a fotí. Už jsem se bál, že nedostatek informací znamená problémy s roverem. Je velká škoda i pro ně, že nedělají tiskovky dvakrát týdně. |
|
Článek o černé skřínce na landeru Tianwen-1:
http://www.js.chinanews.com/news/2021/0517/203760.html
Černá skříňka měla v případě neúspěšného přistání odvysílat data o jeho průběhu. |
|
Jinak ještě jednou odkaz na pěkně zpracovaný panoramatický pohled kolem landeru. Dával ho sem sice už MiraH, ale mám pocit, že ten odkaz trošku zapadnul mezi ostatními obrázky.
https://720yun.com/t/d9vktq8wprm?scene_id=73950360
|
|
Nevím, jestli se dočkáme oficiálně upřesněných souřadnic. Tyto souřadnice jsou odečteny ze snímku MRO HIRISE. Ke každému snímku existuje hlavičkový soubor, ve kterém jsou informace o snímku. Vlastní snímek je pak ve formátu JP2.
https://www.uahirise.org/ESP_069665_2055
Rozsah areocentrických délek pro celý snímek (dole je pouze výřez) v projekci mapy (má správné pootočení) je 109.9879465135°-109.84991465275°, rozsah šířek 25.243164747097°-24.962425945939°. Snímek má rozměry 29630×66492 pixelů.
Lander je na pozici (16102, 42335), rover (16127, 42422).
 |
|
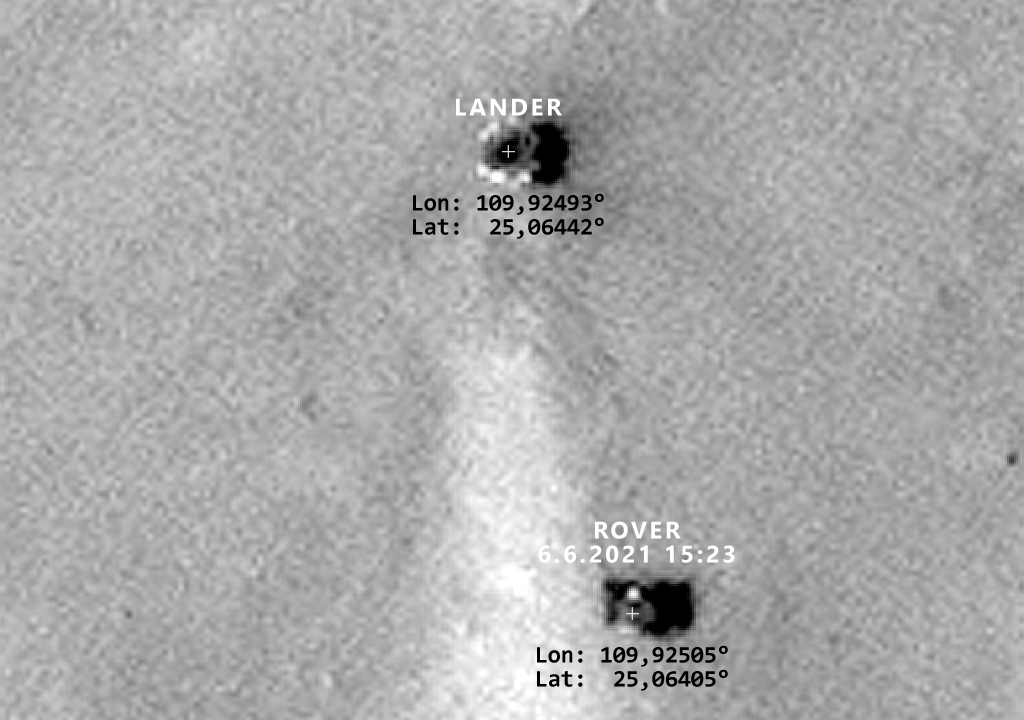
Ještě jednou pohled pod lander. Tentokrát mnohem kvalitnější snímek
 |
|
Ještě se vrátím k souřadnicím Zhurongu, které zatím oficiálně neznáme. Nedávno jsem tady uvedl souřadnice po odečtu ze snímku HIRISE sondy MRO. Vyšly mi nějaké souřadnice, ale později mi to nedalo a zkusil jsem to pro i pro jiné sondy. Jako referenční souřadnice jsem použil ty, které spočítali Golombek, Kuchynka a spol., tedy ty, které pocházejí od lidí z oboru. No, a problém byl na světě. 😊 Nejenom, že to nevycházelo nějak extra přesně v porovnání s referenčními souřadnicemi, ale dokonce se mi lišily i souřadnice stejného místa, ale odečtené z různých snímků.
Zpočátku jsem to počítal obyčejnou lineární interpolací, což pro ekvidistantní válcovou projekci by mělo jít, ale nakonec jsem to raději spočítal, tak jak se to pro tuhle projekci má dělat. Výsledek byl ale nachlup stejný. Nakonec jsem se dočetl, že ta kamera na MRO má sice rozlišení nějakých 0,25 m/pixel, ale s pointací kamery už to tak slavné není a na povrchu Marsu se ta nepřesnost zaměření pohybuje ~100 metrů. Pokud tedy na snímku není i bod se známými souřadnicemi, není možné pouhým odečtem ze snímku určit souřadnice lépe než zhruba 0,001°. Dá se to samozřejmě zpřesnit, ale není to zrovna snadné.
Na zkoušku, že jsem tedy zkusil tedy Viking 1 ze snímku pořízeném v roce 2016. Důvod byl ten, že v roce 2015 IAU doporučila nový systém souřadnic pro Mars, a to jak pro polohu pólu rotační osy (definice rovníku), tak i pro definici nultého poledníku, který je v tomto souřadném systému definovaný pomocí longitudy Vikingu 1, která má zafixovanou hodnotu. Snímky HIRISE ovšem používají souřadný systém Marsu IAU 2000 a po přepočtení do systému souřadnic IAU 2015 to už vyšlo naprosto přesně. Longituda se lišila v řádu 10^-6 stupně, což odpovídá rozlišení kamery. U tohoto snímku tedy už zafixovali souřadnice Vikingu 1 podle nové definice, i když vlastní souřadnice uvedli v systému IAU 2000.
Je tedy potřeba u souřadnic nejenom rozlišovat planetocetrické a planetografické souřadnice, ale i jejich definici. Pro Mars se v současnosti používají dva systémy: IAU 2000 a IAU 2015. A u starších publikací před rokem 2000 těch definic byla také celá řada.
Takže „upřesněné“ souřadnice Zhurongu v IAU 2000
Lon: 109,925°±0,003°
Lat: 25,064°±0,003°
Ta chyba v souřadnicích je směrodatná odchylka, která mi vyšla z 20 snímků sond, u kterých jsou známé přesné souřadnice, přičemž 7 snímků byly snímky sondy InSight, která je „kousek“ vedle a snímkuje se velice často. Pro samotnou sondu InSight směrodatná odchylka vyšla stejně.
[upraveno 21.6.2021 06:21] |
|
Snímek padáku během sestupu

a k tomu ještě video jako gif
https://wx2.sinaimg.cn/mw1024/9da82ba5gy1grs4ranas8g20m80cikjw.gif
[upraveno 23.6.2021 09:32] |
|
S tím videem je trošku problém, tak jinak
https://twitter.com/i/status/1407588134720843780
|
|
jakto ze cinania pri prvom pokuse zvladnu vsetko, co amikom trvalo dekady? - funkcny rover, fotky a videa zo zostupu, cakam ze este z nejakeho sufliku vyleti dron  |
|
citace 23.6.2021 - 10:20 - yamato:
jakto ze cinania pri prvom pokuse zvladnu vsetko, co amikom trvalo dekady? - funkcny rover, fotky a videa zo zostupu, cakam ze este z nejakeho sufliku vyleti dron
USA to zvládli (až na rover) už u Vikingů v roce 1976. Holt teď je technika (hlavně možosti kamer) trochu jinde, než byla ještě v 90. letech. |
|
Prý to okopírovali, říkala to stará Blažková...:-)
Upřímně, jde vidět, jak sebevědomě systematicky postupují.
Inspirují se, ale dokáží vymýšlet spoustu šikovných věcí.
Netušíte, zprovoznili ten georadar, co má vidět až 100 m pod povrch?
Většina chce fotky, mne by zajímaly výsledky přístrojů:
Většina úkolů roveru Ču-žung se týká geologie Marsu, veze šest vědeckých přístrojů. Nejdůležitější je mikrovlnný radar nasměrovaný do země. Umožní vozítku nahlédnout až 100 metrů pod povrch. Kromě něj má Ču-žung i detektor magnetického pole, meteorologickou sondu a laserový spektrometr k určování složení hornin a minerálů. Celé to doplňují dvě kamery.
Zdroj: https://www.lidovky.cz/svet/buh-ohne-jde-na-pristani-cinsky-rover-ma-v-noci-na-sobotu-dosednout-na-mars.A210514_173601_ln_zahranici_lros
|
|
Zhurong opět trochu popojel a míří zhruba jihojihozápadním směrem.

Jenom ještě doplním, že snímek je z 11.6.2021. [upraveno 23.6.2021 18:37] |
|
Další video ze sestupu TW-1 na povrch Marsu. Tentokrát oddělení krytu
https://twitter.com/i/status/1408159315987423246
|
|
Tady je ještě jeden trochu jiný obrázek selfíčka, kde je rover a lander v jiné pozici
http://www.unmannedspaceflight.com/index.php?act=attach&type=post&id=48521 |
|
Podle těchto záběrů. které byly zveřejněny na prezentaci na Polytechnické Univerzitě v Hongkongu, bylo na landeru nainstalováno několik kamer, které zaznamenávaly průběh přistání. Měla by tam být i kamera namířená směrem k povrchu (je to vidět na konci tohoto krátkého videa). Možná se tedy dočkáme i záznamu finální fáze přistání.
https://twitter.com/i/status/1408086543177187330
[upraveno 25.6.2021 18:15] |
|
| https://twitter.com/Kosmo_Michal/status/1409034305448316929
|
|
Asi už celé video ze sestupu
https://twitter.com/i/status/1408958199764455427
nové panorama
http://www.unmannedspaceflight.com/index.php https://twitter.com/i/status/1408972803408269312
|
|
Tentokrát přímo od CNSA a v plném rozlišení, aby to bylo všechno pohromadě
nové panorama v plném rozlišení
http://www.cnsa.gov.cn/n6758823/n6758838/c6812196/part/6787357.jpg
sestup
http://www.cnsa.gov.cn/video/%E7%9D%80%E9%99%86%E8%BF%87%E7%A8%8B%E8%A7%86%E9%A2%91.mp4
video otáčení roveru
http://www.cnsa.gov.cn/video/%E7%81%AB%E6%98%9F%E8%BD%A6%E5%8E%9F%E5%9C%B0%E8%BD%AC%E5%BC%AF.mp4
a popojetí
http://www.cnsa.gov.cn/video/%E7%81%AB%E6%98%9F%E8%BD%A6%E5%90%8E%E9%80%80%E7%A7%BB%E5%8A%A8.mp4
Zdroj
http://www.cnsa.gov.cn/n6759533/c6812196/content.html
[upraveno 27.6.2021 14:02] |
|
Takže nám ještě chybí vysunutí rampy a sjíždění roveru na povrch. Ale to už bych toho asi chtěl moc |
|
Spodní kamera zachytila i padající tepelný štít
https://twitter.com/i/status/1409026150190387202
|
| 27.6.2021 - 22:28 - MiraH | |
|

Zdroj obrázku: (Credit: CNSA) http://www.cnsa.gov.cn/n6759533/c6812196/content.html
Pohled zpět k přistávacímu modulu. Je to výřez z panaramatu, které sem dal už Honza Vacek - viz výše. Vozítko Zhurong [Ču-žung] je na Marsu už 42 solů (marsovských dnů) a celkem ujelo 236 m. Na solárních panelech je už vidět tenká vrstva prachu. Panorama bylo zřejmě pořízeno už 16. června 2021 (33. sol) a přistávací modul je ve vzdálenosti asi 87 m.

Zdroj obrázku: (Credit: Phil Stooke) http://www.unmannedspaceflight.com/index.php?act=attach&type=post&id=48570
Phil Stooke zpracovává i pohyb čínského marsovského vozítka Zhurong [Ču-žung] a na své mapě zaznamenal polohu vozítka, kdy bylo zřejmě pořízeno panoráma, ze kterého je snímek pohledu zpět k přistávacímu modulu. Vypadá to, že kráterům se zatím čínští vědci vyhýbají.
天问一号 , 祝融 |
|
Článek o LIBS spektrometru, který je umístěný na roveru Zhurong
 |
|
Zajímavé a podrobný popis. Vycházejí z obdobných zařízení na amerických sondách.
Zajímavý článek proč atd...
https://astronomycommunity.nature.com/posts/what-science-is-ahead-for-the-zhurong-rover-in-utopia-planitia |
|
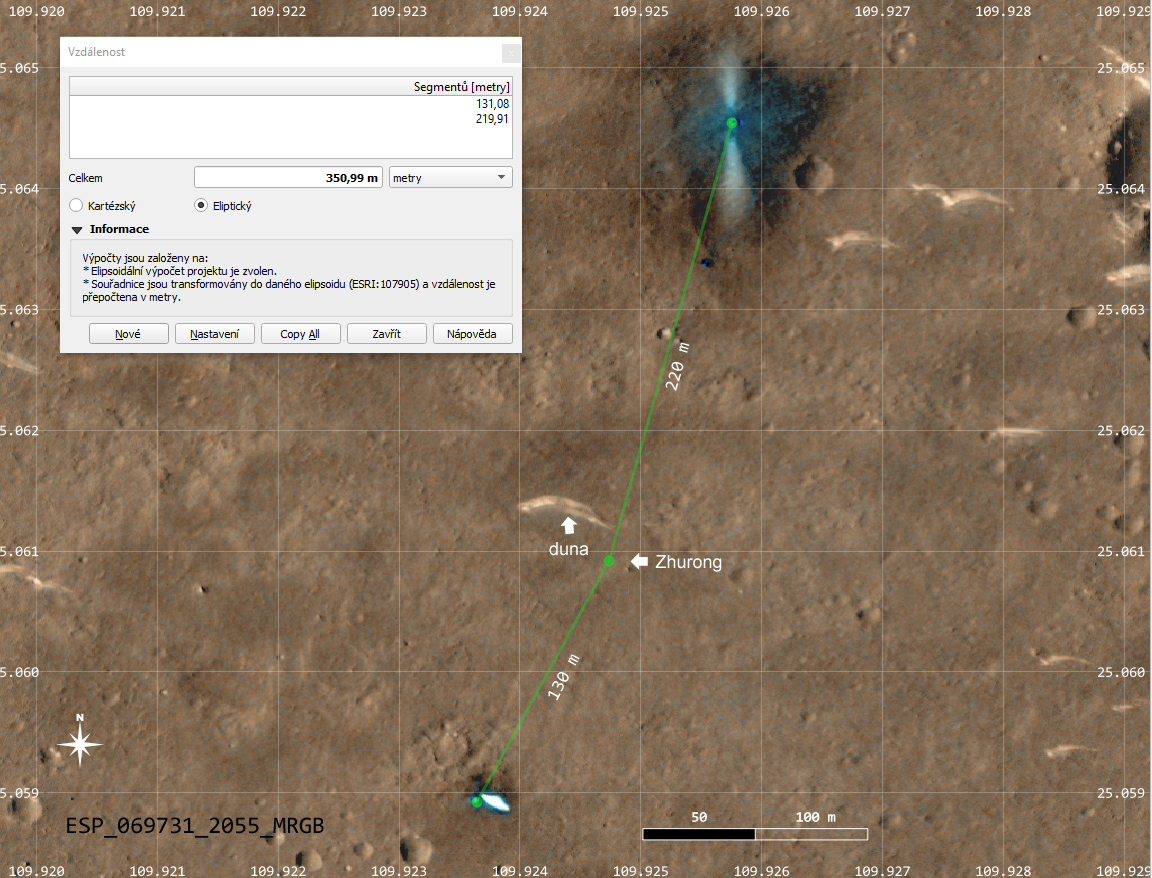
Rover směřuje směrem, kde leží kryt s padákem. Nové obrázky:




 |
|
| Ještě doplním, že Zhurong již urazil celkem 300 m a 4.7. byl ve vzdálenosti ~130 m od padáku. Přímá vzdálenost krytu s padákem od místa přistání je 350 m. |
|
Přibližná poloha roveru Zhurong 4.7., tedy v době pořízení posledního a prvního snímku z předchozího příspěvku s obrázky. Druhá šipka označuje polohu duny na obrázcích.

[upraveno 10.7.2021 00:16] |
|
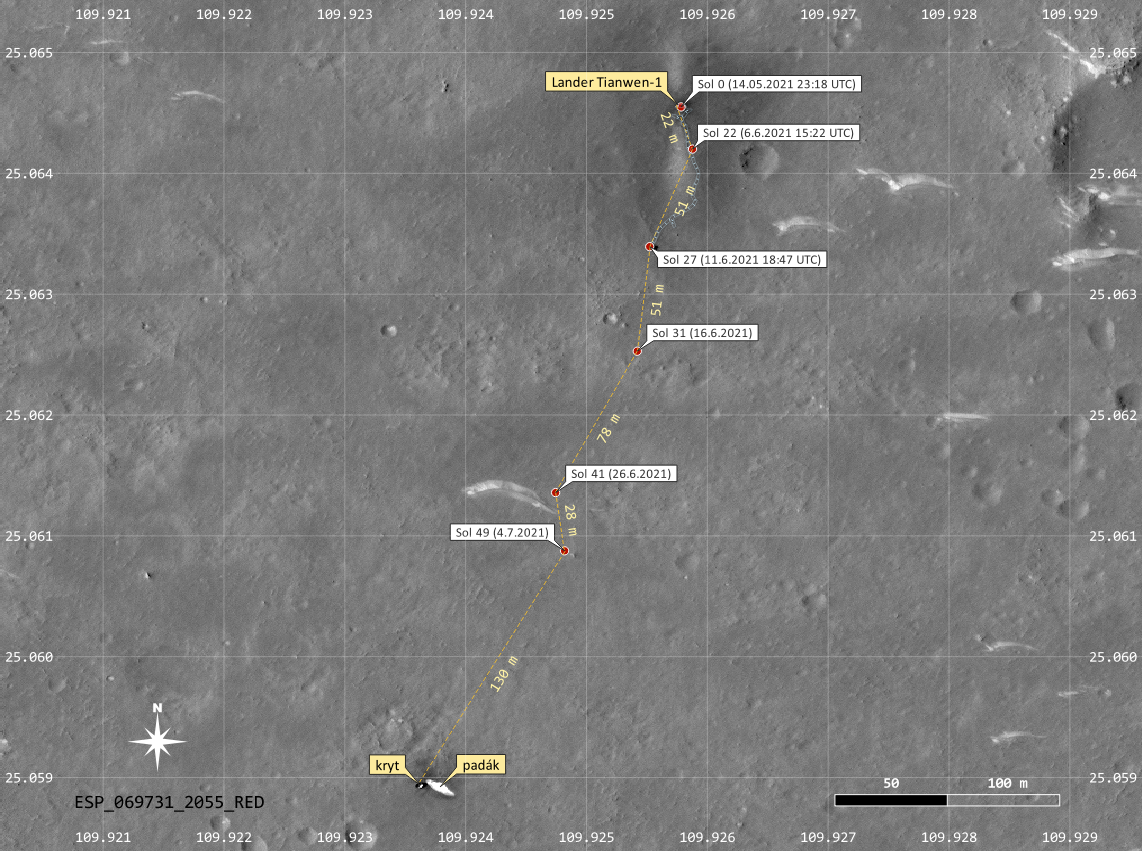
Z údajů, které se mi podařilo dohledat, jsem vytvořil mapku pohybu roveru. Není v ní zakreslená skutečná cesta, kudy rover jel, to půjde zjistit až podle novějších obrázků HIRISE z MRO, kde jsou vidět stopy od kol roveru, ale pouze známé polohy a vzdálenosti mezi nimi. Pokud tam jsou nějaké nepřesnosti, tak se za ně omlouvám.
Mapka je udělaná v aplikaci QGIS.
 |