Spirit - průběh letu
Zpět na hlavní článek
Část 26 - Leden 2006
Předchozí průběh letu
 710. solu (2006-01-01) se pozornost
zaměřila na cíl přezdívaný "Edgar". Zkoumala ho kamera vybavená mikroskopem
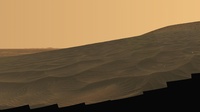
a rentgenový spektrometr. Krajinu "El Dorada" fotografovala panoramatická
kamera. Tím byly ukončeny výzkumy v dunovém poli a řídící tým přichystal
přesun do další pozice pojmenované "Home Plate".
710. solu (2006-01-01) se pozornost
zaměřila na cíl přezdívaný "Edgar". Zkoumala ho kamera vybavená mikroskopem
a rentgenový spektrometr. Krajinu "El Dorada" fotografovala panoramatická
kamera. Tím byly ukončeny výzkumy v dunovém poli a řídící tým přichystal
přesun do další pozice pojmenované "Home Plate".
Na soly číslo 711 a 712 byla připravena dlouhá jízda. Prvního dne překonal
Spirit 56 m. Nejprve vyrazil podle pevně stanovené trasy (tzv. jízda
naslepo) a pak pokračoval, řízen systémem autonomní navigace. Druhá etapa
byla ale bohužel předčasně přerušena, protože palubní počítač nedokázal
sám nalézt bezpečnou cestu. Kvůli popsané nečekané události nebyl schopen
pokračovat v jízdě ani 712. solu.
Po zásahu pozemního střediska pokračoval rover 713. solu v další
cestě a zdolal 80 m. Postup ale nebyl zcela hladký. Během prudké
zatáčky doleva přišlo varování z předního levého natáčecího motorku,
kterému hrozilo zablokování. Jízda nicméně pokračovala a plánovaný úsek
se podařilo zvládnout.
Přesun pokračoval 714. solu (2006-01-05),
během něhož popojelo vozítko o 62 m. Po včerejším poplachu uskutečnil
řídící tým několik zkoušek otáčení roveru. Podle předběžných výsledků se
zdá, že náznaky zablokování motoru byly plané.
Na konci dne měl Spirit za sebou 6031 m celkové překonané vzdálenosti
na Marsu. Intenzívní popojíždění v minulých dnech souviselo
s nadcházejícím obdobím, kdy bude ztížená komunikace s roverem,
pro který nastanou opět tzv. "restricted sols". Během nich lze pokračovat
v jízdě jen každý druhý den.
Náplň 715. solu tvořilo dálkové pozorování náhodných cílů.
716. solu pokračoval rover směrem k cíli nesoucímu jméno "Home
Plate". Podařilo se překonat 54 m postupem kombinujícím pevně zadané
trasy a úseky s využitím autonomní navigace.
717. solu se dostalo vozítko do terénu, na kterém neměla kola
dostatečnou oporu. Prokluzování činilo až 80% a výsledkem byla jen nepatrná
změna stanoviště. Od výchozího bodu se Spirit vzdálil jen o 1.8 m.
Následujícího dne (sol 718) zůstal rover na místě a věnoval se
necílenému dálkovému průzkumu.
719. solu pokračovala jízda v pískovém nepříjemném terénu. Ve
vzdálenosti 9.3 m od výchozí pozice se postup zastavil, protože prokluz
kol přesáhl povolených 80%.
720. solu Spirit opět odpočíval a pokračoval v prohlídce okolí.
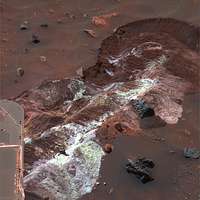 Na místě, kde se rover nacházel ráno 721. solu byl objeven nezvyklý
bělavý prach. Vědci se proto rozhodli, že postup k "Home Plate" na
nějakou dobu přeruší a zajímavou zeminu prozkoumají. Rover pouze mírně
upravil polohu, aby robotická ruka pohodlně dosáhla na cíle pojmenované
"Arad". V první řadě byly detaily označené jako "Arad 1" a
"Arad 2" zdokumentovány panoramatickou kamerou a infračerveným
spektrometrem.
Na místě, kde se rover nacházel ráno 721. solu byl objeven nezvyklý
bělavý prach. Vědci se proto rozhodli, že postup k "Home Plate" na
nějakou dobu přeruší a zajímavou zeminu prozkoumají. Rover pouze mírně
upravil polohu, aby robotická ruka pohodlně dosáhla na cíle pojmenované
"Arad". V první řadě byly detaily označené jako "Arad 1" a
"Arad 2" zdokumentovány panoramatickou kamerou a infračerveným
spektrometrem.
722. solu (2006-01-14) se uskutečnilo
další necílené pozorování okolí a panoramatická kamera fotografovala stopy,
které rover zanechal v pískovém terénu v minulých dnech.
Spirit měl k tomuto dni za sebou 6096 m jízdy na Marsu.
Soly 723 až 725 znamenaly pro Spirit intenzivní vědecký průzkum
rozličných míst na stanovišti "Arad". Ke slovu přišla kompletní sada
přístrojů umístěných na robotické ruce, tzn. mikroskop, rentgenový a
Mössbauerův spektrometr. Tím byl prakticky výzkumný program ukončen.
Výsledky měření ukázaly, že zvláštní bílou zeminu tvoří minerály charakteru
solí, mezi nimiž převládají sírany železa. Složením připomíná bílá zemina
objekt bohatý na křemík "Paso Robles", který byl předmětem výzkumu před
drahným časem, když ještě rover stoupal k vrcholu kopce. Přítomnost
solí je další stopou vedoucí k důkazu existence vody na Marsu
v dávných dobách.
Pokus o jízdu 726. solu byl předčasně přerušen, protože rover zápolil
s prokluzujícími koly na pískovém povrchu. Spirit pořizoval obrázky
a prováděl atmosférická měření za pomoci infračerveného spektrometru.
Postup v dunách poblíž "Aradu" se již několik dní nedařil, prokluzování
dosahovalo až rekordních 92%. Bylo zřejmé, že bude nutno vymyslet jinou
strategii a trasu postupu.
Řídící tým byl v úsilí o stanovení správné metody jízdy v písku
úspěšný a 727. solu se podařilo popojet o slušných 26 m. Po
skončené cestě kamery NavCam a PanCam fotografovaly terén kvůli optickému
vyhodnocení aktuální polohy. Pokračovalo zkoumání atmosféry zahájené
minulého dne.
728. solu se podařilo technikům úspěšně naplánovat další jízdu ven
z nepříjemných pískových dun a blíž k "Home Plate", kde se
očekává další detailní průzkum. Po zastavení nesmělo chybět povinné
fotografické ověření polohy v terénu.
Zručnost plánovačů se neustále zlepšuje a doba potřebná k rozhodnutí
o trase roveru a ověření sekvence povelů před odesláním je již docela
krátká. Zatímco na začátku mise před dvěma roky trvala specialistům příprava
k jízdě asi 13 hodin, podobná operace zabrala např. 720. solu
už jen 2 h 35 min.
Po skončené jízdě měl rover na svém kontě již 6178.96 m pohybu po
povrchu planety.
729. solu (2006-01-21) pokračoval Spirit
v necíleném atmosférickém měření.
V plánu víkendových solů číslo 730 a 731 byl mj. přesun o
10.8 m k hřebeni "Lorre Ridge". Jako při každé cestě bylo nutno
pořídit sérii snímků před zahájením pohybu a po jeho skončení. Většinu
neděle setrval Spirit na jednom místě a dobíjel baterie, aby měl dostatek
energie na dlouhou jízdu, kterou zamýšleli technici uskutečnit v pondělí.
732. solu se nejprve podle předem stanovené trasy a posléze pomocí
autonomní navigace, při níž se počítačovým programem na základě snímků
z kamer vyhodnocují nebezpečné překážky, podařilo překonat 40 m.
Před jízdou se uskutečnilo snímkování cíle "FuYi". Na závěr přesunu
fotografovaly panoramatická a navigační kamera mozaiku terénu ve směru
dalšího postupu. Dalšího dne ráno pokračovalo snímkování. Navigační kamera
dokumentovala terén proti směru jízdy a kamera PanCam doplňovala pořízené
obrázky před vozítkem dalšími záběry přes jiné dva barevné filtry.
733. solu prodloužil rover přesun dalšími asi 40 m. Krátce před
vyjetím v módu autonomní navigace se vyskytl problém s dynamickou
brzdou řídícího servomotoru levého předního a pravého zadního kola.
V tomto okamžiku přerušilo řídící středisko další jízdu.
Podobná chyba se vyskytla již 265. solu (2004-10-01)
a 277. solu (2004-10-13). Tenkrát bylo
postiženo pravé přední a levé zadní kolo. Tehdejší analýzy a ověřovací
zkoušky ukazovaly, že potíže způsobuje zpožděný kontakt na stavovém relé.
Řídící tým vyslal povel na ignorování signálu z relé a od té doby
pokračoval rover v putování bez jakýchkoliv potíží a se všemi funkčními
servomotory.
Po posledních událostech se technici prozatím rozhodli, že budou pokračovat
v jízdě a nebudou používat postižené servopohony. Cesta vedla nadále
směrem k nápadnému kruhovému útvaru "Home Plate". Na místo by mělo
vozítko dorazit a objekt prozkoumat ještě před nástupem zimy. Vědci doufají,
že naleznou vrstevnaté geologické výchozy, ze kterých by se daly vyčíst
dodatečné informace o historii "Columbia Hills".
734. solu popojel rover autonomně přibližně o 9 m. Inženýři
podnikali na zkušebním pozemním exempláři stejné diagnostické testy, které
se uskutečnily po výše zmíněné závadě 265. solu. Chtěli ověřit, že
tehdejší procedury budou správně fungovat i se současným letovým softwarem.
Prozatím měl Spirit povolen pohyb s vypnutým ovládacím servopohonem
levého předního a pravého zadního kola a směl postupovat pouze v případě,
že je před ním jen volný terén, ve kterém není nutno objíždět překážky.
735. solu (2006-01-27) byl velice nabitý.
V plánu byl krátký autonomní přesun za podmínek popsaných v předešlém
textu a následovat měla krátká diagnostika, která měla vyhodnotit chování
dynamických brzd. Celková překonaná vzdálenost činila 26.3 m. Během
pohybu nepoužíval rover ovládací motorky na levém předním a pravém zadním
kole. Zkoušky po zastavení byly opakováním testů při podobných potížích
265. solu. Spirit nejprve mírně natočil postižená kolečka a pak je
opět nastavil do přímé polohy. Během pohybů nepřišlo žádné chybové hlášení.
Spirit během dne snímkoval panoramatickou kamerou cíle "Allegheny Ridge"
a "YuGong".
Celková překonaná vzdálenost na Marsu činila k tomuto dni
6279.01 m. K cíli "Home Plate" zbývalo ještě asi 170 m.
736. solu objevil řídící tým na snímcích zajímavý kámen a rozhodl se
věnovat mu nějaký čas vědeckého pozorování. Mikroskop na robotické ruce
získal do mozaiky struktury povrchu několik snímků a Mössbauerův přístroj
shromáždil spektrografické informace o mineralogickém složení. Panoramatická
kamera fotografovala cílové plochy pojmenované "Xing Tian", "GongGong",
"Luo Zu" a "Cang Jie". Infračervený spektrometr umístěný na stožáru sledoval
"Cang Jie", "Sui Ren", "Ho Ji" a "Luo Zu".
737. solu probíhalo dálkové pozorování cíle "Ho Ji" a atmosférická
měření panoramatickou kamerou.
738. solu zahájil rover postup podél skalnatého hřebene, který ležel
mezi vozítkem a oblastí "Home Plate" a během dne dokázal zdolat vzdálenost
33.7 m. K dispozici byly již výsledky zkoušek kol z 735. solu.
Bezprostřední chování i výsledky dalších diagnostických aktivit zcela
odpovídaly stavu pozorovanému zmíněného 265. solu. Rovněž závěry
vyvozené z tohoto zjištění byly stejné jako v předchozím případě.
Rover dostal pokyn ignorovat případná chybová hlášení z dynamických
brzd. Další přesuny se tedy už měly odehrávat s obnovenou funkcí
natáčení všech kol.
739. solu (2006-01-31) popojel Spirit o
dalších 30.5 m. Po prvních 5 m postupu řízeného autonomním
navigačním systémem se nicméně zastavil kvůli banální chybě v řazení
povelů. Řídící tým přidal do postupu dodatečnou automatickou kontrolu,
která by v budoucnu podobné chyby vyloučila. Spirit nebyl schopen
získat většinu z plánovaných snímků, prováděných vždy po uskutečněném
přesunu.
Následující průběh letu
Fotogalerie obsahuje celkem 89 obrázků, nejnovější byl přidán 2006-07-16.
Počet reakcí: 4
Poslední: 2007-06-22 16:06:09
|


