Opačné změny apogea a perigea odpovídají zcela neřízené plachtě (která vystavuje Slunci zhruba stejně velkou plochu jak při letu po oběžné dráze kolem Země směrem "od Slunce" [zvedá se apogeum], tak při letu "ke Slunci" [klesá perigeum]). Když je náhodou plachta vůči Slunci natočena větší plochou, tak jsou obě hodnoty ovlivněny více, když je náhodou natočena spíše hranou, tak jsou obě hodnoty ovlivněny méně.
Souhlasím tedy s lamidem, že LightSail-2 zatím demonstroval jen ovlivnění dráhy sluneční plachtou (což už dokázaly i předchozí plachetnice), ale ne řízené zvyšování oběžné dráhy (což mělo být cílem této mise). "Mission Success" byl tedy podle mne vyhlášen trochu předčasně, ale osobně doufám, že se jim to správné aktivní řízení plachty ještě podaří dosáhnout.
P.S.: Možná se jim daří aktivně ovlivnit směr natočení plachty vůči Slunci, jen to ale nestihnou během půloběhu (což je třeba), ale až během několika oběhů, takže výsledek není dostatečný. Obávám se že je možné, že ten setrvačník, kterým to otáčejí, nemá dostatečnou "sílu" a už to zrychlit nepůjde. Uvidíme. Teoreticky by mělo stačit, aby plachtu během půloběhu otočili vždy jen o malý kousek (pár stupňů), ale během druhého půloběhu musí plachtu otočit zase o stejný kousek zpět do původní polohy. To by se mělo projevit převahou změn buď apogea, nebo perigea.
Áno. Súhlas. Viď môj príspevok 29.7.2019 o 20:42 "V podstate, ak zmena apo a peri je rovnaká, len opačného znamienka, tak plachta počas obehu nemení polohu." Dodám teraz" voči Slnku".
Ako je to s natočením plachty netuším. Na stránke http://www.planetary.org/explore/projects/lightsail-solar-sailing/lightsail-mission-control.html
je pole "ATTITUDE CONTROL MODE" a ten má 3 stavy:
-Detumble
-Z-axis alignment
-Solar sailing
Teraz je v stave Detumble, teda nehýbe sa voči svojím osiam.
Mala by byť v stave Solar sailing- kolmo k Slnku pri lete od Slnka, rovnobežne pri lete k Slnku.
Ako stíha natáčanie v stave Solar sailing neviem ako zistiť.
Z uvedenej stránky sa dá stiahnuť balíček dát LS2_data (Tlačítko DOWNLOAD RECENT DATA), ktorý obsahuje údaje zo sondy. Posledný 2332504 Wed Jul 31 18:12:48 2019
UTC.
Sú tam rôzne údaje:
... 273: ADCS Mode = 0
274: Mode = Detumble
275: ADCS Flags = 0x17 [bitmask]
276: Filter = converged
277: Panels = deployed
278: Sail = deployed
279: Eclipse = illuminated
280: Quaternion[0] = 0.406250
281: Quaternion[1] = 0.382812
282: Quaternion[2] = -0.820312
283: Quaternion[3] = 0.125000
284: Rate X = -0.015625 [rad/s]
285: Rate Y = 0.000000 [rad/s]
286: Rate Z = 0.039062 [rad/s]
287: Gyro X = 0.000000 [deg/s]
288: Gyro Y = 0.000000 [deg/s]
289: Gyro Z = 0.000000 [deg/s]
290: Intrepid Gyro X = -0.625000 [deg/s]
291: Intrepid Gyro Y = 0.375000 [deg/s]
292: Intrepid Gyro Z = 2.625000 [deg/s]
293: -X Solar Sens X = 137
294: -X Solar Sens Y = 74
295: +X Solar Sens X = 42
296: +X Solar Sens Y = 69
297: -Y Solar Sens X = 88
298: -Y Solar Sens Y = 112
299: +Y Solar Sens X = 88
300: +Y Solar Sens Y = 104
301: +Z Solar Sens X = 110
302: +Z Solar Sens Y = 72
303: +X Magnetometer X = 21200 [nt]
304: +X Magnetometer Y = -4700 [nt]
305: +X Magnetometer Z = -12700 [nt]
306: +Y Magnetometer X = -12500 [nt]
307: +Y Magnetometer Y = -19200 [nt]
308: +Y Magnetometer Z = 7500 [nt]
309: X Torquer Voltage = 0.000000 [V]
310: X Torquer Current = -0.015625 [A]
311: X Torquer Power = -0.0 [mW]
312: Y Torquer Voltage = -0.062500 [V]
313: Y Torquer Current = -0.015625 [A]
314: Y Torquer Power = 1.0 [mW]
315: Z Torquer Voltage = 0.000000 [V]
316: Z Torquer Current = 0.000000 [A]
317: Z Torquer Power = 0.0 [mW]
318: Motor Voltage = 0.000000 [V]
319: Motor Current = 0.000000 [A]
320: Motor Power = 0.0 [mW]
321: -X Panel = deployed
322: +X Panel = deployed
323: -Y Panel = deployed
324: +Y Panel = deployed
325: Deployment = safe
326: PIC Power = off
327: PIC Activity = idle
328: Motor State = halted
329: Motor Count = 135786
330: Motor Limit = 135728
331: Wheel Speed = 0 [RPM]
332: SS Votes < 3 = 6600 [count; wraps at 4096]
333: SS Votes == 3 = 700 [count; wraps at 4096]
334: SS Votes > 3 = 2300 [count; wraps at 4096]
Porozumieť tomu, v akej polohe je plachta k Slnku z toho ale neviem.
[upraveno 1.8.2019 09:44]
Orbita LightSail a os k Slnku-žltá, Jarná rovnodennosť a severný pól.
Tesne pred prechodom do tieňa je perigeum a apo je na opačnej strane, keď vylieta z tieňa.
Inak, mal by som si opraviť výpočet, v tieni na plachtu Slnko nesvieti.
Z těch telemetrických dat ("Rate" a "Intrepid Gyro") mám dojem, že plachta zatím v prostoru prostě pomalu rotuje. V jedné ose je to přes 2° za sekundu, tedy jedna celá otočka za méně než 3 minuty. V druhé ose je to přes 0,6°/sec, tedy jednou za méně než 10 minut. To jsou čísla podstatně menší, než je doba půloběhu LightSail-2 kolem Země. I mód "Detumble" bych si přeložil jako "zastavování rotace" (nikoliv "zastavená rotace"), takže poloha plachty vůči Slunci se zatím zřejmě prostě pořád mění. Nejprve se jim tedy musí podařit zcela zastavit rotaci (alespoň ve dvou osách, ale raději ve všech třech) [pomocí elektromagnetů, které tam mají]. Teprve pak bude možno se pokoušet o aktivní "plachtění". Budeme si muset počkat na upřesnění a na další vývoj situace.
Detumble: The spacecraft is attempting to cancel out any rotation about its three axes and “hold still” as it orbits.
Detumble: Kozmická loď sa pokúša zrušiť akúkoľvek rotáciu okolo svojich troch osí a „držať v pokoji“, keď obieha.
Ja to chápem, že sonda je držaná v konštantnej polohe.
Doba obehu je 99,13 minút.
data 2286983 v mode Solar Sailing:
273: ADCS Mode = 2
274: Mode = Solar Sailing
275: ADCS Flags = 0x17 [bitmask]
...
284: Rate X = 0.000000 [rad/s]
285: Rate Y = 0.000000 [rad/s]
286: Rate Z = 0.000000 [rad/s]
287: Gyro X = 0.000000 [deg/s]
288: Gyro Y = 0.125000 [deg/s]
289: Gyro Z = 0.125000 [deg/s]
290: Intrepid Gyro X = -0.750000 [deg/s]
291: Intrepid Gyro Y = 1.375000 [deg/s]
292: Intrepid Gyro Z = 4.125000 [deg/s]
... 331: Wheel Speed = 4771 [RPM]
Ak Intrepid gyro je rýchlosť zmeny uhla plachty tak 90° dá pri rychlosti 4,125 deg/s za 21 sekúnd.
A to som vybral náhodou.
Inak zotrvačník je len jeden a jeden záložný. O natočenie sa starajú 3 magnetické tyče a reakčné koleso.
"With respect to ADCS, spacecraft attitude is
determined using 4 magnetometers, 5 solar angle sensors, one 3-axis gyro which acts as the primary angular rate sensor,
and one 3-axis gyro as the backup. Attitude control is accomplished using 3 variable dipole magnetic torque rods and 1 0,06 Nms reaction wheel."
Doplňujem z pdf:
"Utilize a momentum wheel to achieve 90-degree
slew maneuvers about one axis in < 5 minutes."[upraveno 1.8.2019 12:30]
Edit2: pridal som Wheel Speed [upraveno 1.8.2019 12:35] [upraveno 1.8.2019 13:03]
Edit3: Sonda a plachta sú jedno teleso. O zmene orientácie sondy a teda plachty, asi hovorí udaj Rate XYZ. Čo je údaj Gyro a silové(intrepid) gyro netuším. Nič, aj tak z toho polohu sondy k Slnku nevyčítam. [upraveno 1.8.2019 14:24]
Edit:
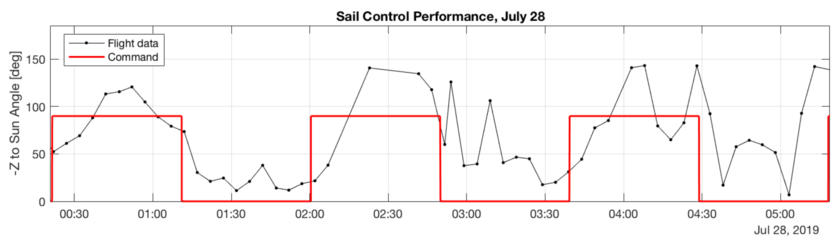
Keď sa pozriem na obrázok, tak prvý cyklus vyzerá dobre, ale už pred 3:00 je to rozhádzané a problém v regulácii. Výsledkom je: [upraveno 4.8.2019 01:29]
Díky za schéma LightSail-2 (LS2). vypadá to, že "Z" je prostě podélná osa 3U cubesatu a plachta je na ní kolmá. Takže samozřejmě souhlasím s tím, že při úhlu 0° (nebo 180°) mezi osou Z a Sluncem (Z/S) je "aktivní" největší plocha plachty (působí na ni největší síla od fotonů), zatímco při úhlu 90° by měla být plachta hranou ke Slunci a tedy s malou "aktivní" plochou.
Není mi jasné, jak určují (měří) ten úhel Z/S. Nedá se to poznat z údajů gyroskopů, ale šlo by to ze senzorů Slunce a z magnetometru (při současné znalosti pozice na oběžné dráze kolem Země). Osobně to ale z té telemetrie odvodit nedokážu (pokud už to nemají nějak "na palubě" převedené do toho "kvaternionu" [Quaternion]).
Volně stažitelná telemetrie také obsahuje jen data jen z doby přeletů nad západním pobřežím USA (kde mají pozemní stanice), takže je to vždy jen pár minut informací a pak skoro 1,5 hodiny bez dat (plus mnoho hodin denně bez dat, když LS2 nepřelétává nad USA. Není mi tedy ani jasné, odkud pocházejí ta data použitá v grafu úhlu Z/S z několika celých oběhů dne 28.7.2019. Pokud by totiž ta data odpovídala skutečnosti (což tvrdí tým LS2), mělo by se to projevit výraznějším rozdílem změn výšky apogea vůči změnám výšky perigea. Zatím mi to tak nepřipadá, ale snad to bude zřetelnější po delší době "plachtění". Uvidíme.
P.S.: Ani výsledky té "simulace neřízeného rotování" (Simulated Tumbling) (v článku na arsTECHNICA) mi nepřipadají moc přesvědčivé (proč by se přitom nemělo zvyšovat apogeum?), takže těm jejich argumentům (že to dokazuje aktivní řízení LS2) nějak nerozumím. Potřeboval bych to vysvětlit.
Áno, Z osa je pozdĺžna osa cubesatu 10x10x30 cm.
uhol som aj znázornil:
Slnko Lightsail
Z údajov na ich stránke orientáciu sondy k Slnku určuje ten Quaternion.
Odkiaľ údaje pre Quaternion získavajú neviem. Asi sa napočítava z gyroskopov a verifikuje zo slnečných senzorov.
V novém článku na blogu Planetary Society ( http://www.planetary.org/blogs/jason-davis/lightsail-2-weeks-solar-sailing.html ) jsou informace o tom, že v posledních dnech se tým LS2 pokusil vylepšit kvalitu "plachtění" tím, že od 3.8.2019 teď "desaturaci" řídicího setrvačníku dělá v době, kdy je LS2 ve stínu (a na natočení plachty v tu chvíli tedy nezáleží). Od 5.8.2019 navíc upravili SW tak, aby "nepřeháněl" otáčení plachty a přesněji se držel požadovaných poloh 0 a 90°. To by samozřejmě mohlo pomoci. Uvidíme.
Autor článku ale tvrdí, že už dříve LS2 docela slušně "plachtil" a dokládá to už dříve zveřejněným grafem natočení plachty ze dne 28.7.2019 (kde je vidět solidní shoda s požadovanou polohou, ale i to "přestřelování" otočení plachty). Časy jsou prý v UT (podle článku).
Samozřejmě ale záleží ještě na správném časování toho otáčení. Dokážete někdo ověřit, jaká byla přesná pozice LS2 na oběžné dráze toho 28.7.2019 od 0:00 UT do cca 5:30 UT vůči Slunci (tedy kdy byl LS2 ve stínu a kdy byl na světle)? Osobně nevím, jak přesně to ověřit, ale zajímalo by mě to. Dalo by se pak určit, jestli to časování je správné nebo ne. Z TLE odvozené změny oběžné dráhy totiž podle mne správnému časování moc neodpovídají (do 4.8.2019).
citace:Dokážete někdo ověřit, jaká byla přesná pozice LS2 na oběžné dráze toho 28.7.2019 od 0:00 UT do cca 5:30 UT vůči Slunci (tedy kdy byl LS2 ve stínu a kdy byl na světle)?
Data na stránke Control Mission pre 28.7. začínajú:
Sun Jul 28 12:23:52 2019
teda 00:00 do 5:30 tam nie sú, nie je z čoho vypočítavať/overovať.
citace: Z TLE odvozené změny oběžné dráhy totiž podle mne správnému časování moc neodpovídají (do 4.8.2019).
Doteraz len 1x sa im podarilo zväčšiť elipsu o 30 m(polos o 15).
Inak mám už zlý dojem z Planetary Society, silne znásilňujú výsledky v prospech úspechu. Nárast apogea mali 28.7. 914 m, ale pokles perigea v ten deň bol 938 m a teda polos "a" sa zmenšila o 12 m(elipsa za zmenšila o 24 m).
Nech to uvedú v celých súvislostiach, inak im prestanem fandiť.
citace:
Inak mám už zlý dojem z Planetary Society, silne znásilňujú výsledky v prospech úspechu. Nárast apogea mali 28.7. 914 m, ale pokles perigea v ten deň bol 938 m a teda polos "a" sa zmenšila o 12 m(elipsa za zmenšila o 24 m).
Nech to uvedú v celých súvislostiach, inak im prestanem fandiť.
Vypadá to, že plachtění na sluneční vítr je mnohem náročnější, než se čekalo. Bude asi trvat ještě dlouho, než se to pořádně naučí.
To akú mal polohu LightSail 44420 28.7. trebárs 00:45 musí ukázať každý satelitný tracker.
[upraveno 7.8.2019 17:25]
Edit:
Je pravda, že na rozhraní svetla a tieňa je 00:50, a podľa toho grafu prešiel na 0° o cca 1:10.
Skúsim sa na to pozrieť cez STK. [upraveno 7.8.2019 17:33]
Ak budú stačiť údaje v takejto forme: [upraveno 7.8.2019 18:05]
[upraveno 7.8.2019 18:15]
Tomu posunu nerozumiem. Môj graf je v UTC.
Graf na arstechnica.com nemá údaj o časovom pásme.
Len Jason Davis vo svojom článku udáva:
"During the first orbit, from 00:00 to 02:00 UTC."
Tam musí byť nie aké nedorozumenie, nechce sa mi veriť, že nevedia kde majú sondu.
Ešte tabulka:
Satellite-LIGHTSAIL_2_44420: Eclipse Times
Start Time (UTCG) Stop Time (UTCG) Duration (sec) Obstruction Start Pass Number Stop Pass Number Current Condition Worst Condition Total Duration (sec)
------------------------ ------------------------ -------------- ----------- ----------------- ---------------- ----------------- --------------- --------------------
28 Jul 2019 00:06:44.156 28 Jul 2019 00:41:50.943 2106.787 Earth 289 290 Umbra Umbra 2124.140
28 Jul 2019 03:24:50.847 28 Jul 2019 03:59:57.582 2106.735 Earth 291 292 Umbra Umbra 2124.083
[upraveno 7.8.2019 18:53]
Edit
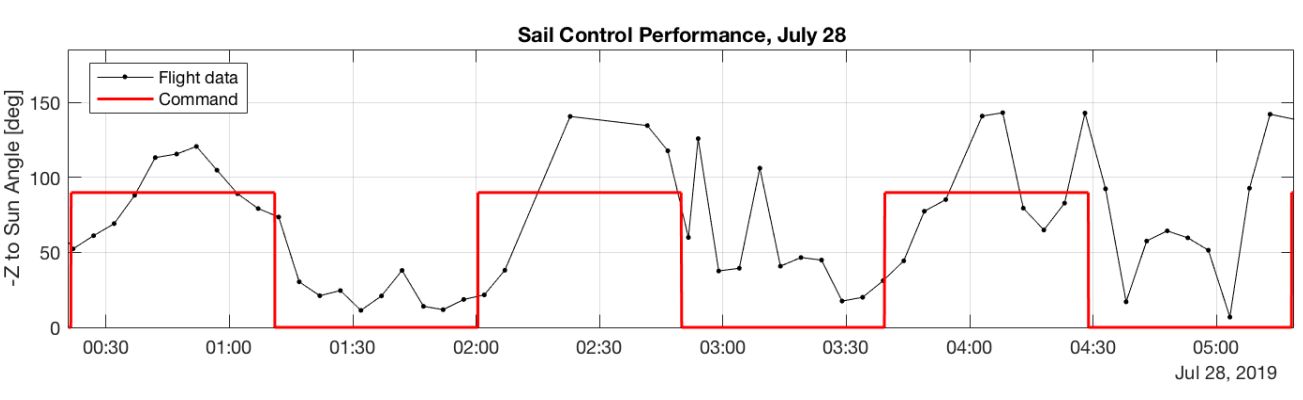
Len pre upresnenie, polovica času zatmenia(letu v tieni), by mala byť nad zlomom červenej čiary (z 0 na 90°).
Na orientácii plachty v tieni nezáleží, teda je jedno v akom čase sa vykoná.
Natočenie na osvetlenej strane sa deje niečo pred najbližším bodom k Slnku, žeby to bolo, že nieaký čas to trvá a robia to v predstihu? [upraveno 7.8.2019 21:31]
Díky za doplnění grafu o doby ve stínu. Ověřil jsem si to nezávisle v programu Orbitron a vyšlo mi to stejně (s TLE z 7.8.2019 i s TLE z 28.7.2019). Myslím tedy, že požadované časování je nastaveno správně. Reálné provedení ale bylo toho 28.7.2019 o dost horší (než "plán"). Po vyletění ze stínu do světla byla velmi dlouho plachta nastavena v úhlu kolem 45° vůči Slunci, což samozřejmě hodně "brzdilo" a tedy snižovalo perigeum. Ani v době po přetočení nebyl úhel často "na nule", ale i hodně přes 30° (i přes 60°), takže ani zvyšování apogea nebylo tak velké, jak by mohlo.
Když se ale teď na celou situaci dívám trochu "z nadhledu" tak musím konstatovat, že sluneční "plachtění" na nízké oběžné dráze není nic jednoduchého, ani efektivního. Poloha plachty musí být nastavována opravdu docela rychle a přesně. I tak ale na zvyšování apogea zbývá zřejmě méně, než třetina doby oběhu (protože zbytek času je plachta ve stínu). Navíc při přetáčení o celých 90° ani přesné časování není optimální z hlediska zvyšování oběžné dráhy (celkové energie družice), protože např. v bodě "nejblíže ke Slunci" a natočení plnou plochou (úhel 0°) směřuje vektor tahu tak, že dále snižuje perigeum (nebo ho alespoň posouvá v prostoru). Bylo by možná lepší v tu dobu udržovat orientaci plachty tak, aby vektor tahu byl ve směru letu po oběžné dráze (aby souhlasil s vektorem rychlosti družice). Někdy (později) se pokusím zjistit (přepočítat), jestli by to bylo účinnější, než jen přepínání stavů "maximální tah směrem od Slunce" (plná plocha) a "minimální tah" (hrana).
Každopádně věřím, že pokud se bude plachta natáčet přesněji (o což se snaží od 5.8.2019), tak výsledky by mohly být lepší (než do té doby). Uvidíme.
citace:Díky za doplnění grafu o doby ve stínu. Ověřil jsem si to nezávisle v programu Orbitron a vyšlo mi to stejně (s TLE z 7.8.2019 i s TLE z 28.7.2019).
Nieaký rozdiel tam musí byť. Správny satelitný tracker by mal použiť TLE čo najbližšie k skúmanému času.
S ostatným súhlas, dúfam, že výraznejší rast elipsy sa im podarí dosiahnuť a aj trvale udržať.
Hlavne, že budú mať na to dlhší čas, odhady teraz hovoria o zániku až za rok. Na skúmanie to odhadujem na dva mesiace od roztvorenia plachty, ak nastane pokles perigea pod 500 km, nastúpi arodynamický odpor.
A hlavne som vďačný za TLE, ktoré to nezávisle zhodnotia.
Pozrel som sa na rozdiel polohy sondy podľa TLE 27.7.(19208) a 7.8.(19219).
Očakával som väčší rozdiel:
28.07.2019 00:45:00
Julian date Satellite Longitude Geocentric Latitude
TLE 19208.821 61.3893002 East 8.30775408 North
TLE 19219.538 61.1816475 East 8.34329985 North
A nakreslil posun manévru pred najbližším bodom k Slnku:
Opravil som aj orientáciu sondy, +Z sú solárne panely a tie ťahá sonda za sebou, tak aby boli osvetlené. [upraveno 8.8.2019 08:44]
Právě že mi rozdíl v časech vletění do stínu s různými TLE vyšel menší než 2 minuty, tak jsem ho bral za nepodstatný a napsal jsem, že to je stejné.
Obrázek je pěkný a jasně ukazuje, že časování je správné. Ovšem ukazuje optimální řízení polohy plachty. Skutečnost (viz černá čára v grafu) byla toho 28.7.2019 o dost horší, a také nevíme, kterým směrem ty nepřesnosti byly (kam směřoval tah nepřesně nastavené plachty).
Každopádně naději to má dobrou a doufám, že alespoň chvíli to bude opravdu "plachtit" (zvedne se průměrná výška dráhy [celkově alespoň o kilometr, aby to bylo jasně prokazatelné]).
citace:... Skutečnost (viz černá čára v grafu) byla toho 28.7.2019 o dost horší, ...
Áno, flight data grafu sú hrozné, ešte tá prvá orbita do 2:00 by ušla.
V podstate o ich výsledku stále hovorí nezväčšovanie orbity.
Nespúšťam z TLE oči, a stále čakám plusové čísla.
Ako som písal, zatiaľ len raz sa tak stalo.
Zobrazil som si uvedený časový interval 28.7.2019 00:00 do 5:00.
Dal som si vykresliť vektor peri a apogea.
To, že na stáčanie orbity pôsobí radiálna sila z plachty som nakreslil v animácii vyššie.
Tu na videu je vidieť ten pohyb- rotovania orbity. Len nechápem, to rýchle prerotovanie vektorov.
2019-07-28 00:00 - 05:00 UTC
2019-08-08 00:00 - 05:00 UTC
Tu si to vysvetľujem, že po nasadení plachty sa tlačí na stáčanie orbity a po zrušení sily sa orbita vráti do východzieho stavu?
Vykreslenie je len z TLE.
Môže v nich byť chyba? Inak posledné rp=7 082,386 ra=7 108,038 km.
Nejde mi to moc do hlavy.
Edit: pozrel som sa na TLE a tam údaj o pohybe perigea nie je.
Software si ho musí vypočítavať z rozdielu Argument perigea v po sebe idúcich TLE. [upraveno 9.8.2019 14:57]
Edit2:
Graf posuvu perigea v jednotlivých TLE:
Rotuje. A to pred i po roztvorení plachty. [upraveno 10.8.2019 06:35]
Bohužel mi začíná docházet, že to je nevynutelný problém. Pokud by se chtěli vyhnout poklesu perigea, museli by tah zapínat na velmi krátký okamžik v jeho blízkosti - jenže to by vzhledem k tomu, jak je ten tah malý, vedlo stěží k nějakému měřitelnému zvýšení apogea.
Pokud by chtěli dráhu zase udržet přesně kruhovou, tak zase budou muset mezi manévry na protilehlých bodech oběžné dráhy čekat cca půl roku, což by opět asi k měřitelným výsledkům nevedlo.
Je to větší problém, než jsem si sám před lety představoval :-/ Na heliocentrické dráze by to mohlo být celkem efektivní, pro odlet z vysoké dráhy (nad cca 2000-3000 km) by to asi taky šlo... ale použít plachtění pro zvyšování nízké oběžné dráhy kolem Země (na které jsou obvykle umísťovány Cubesaty) je celkem oříšek.
Minimálně je vidět, že varianta otáčení celou soustavou pomocí setrvačníku má spoustu problémů. Alternativní koncepty, vč. Cosmos 1, počítaly pouze se změnou polohy plachty (či plachet) vůči tělesu družice (myslím, že u czCube jsme to uvažovali taky - mělo jít o mechanické sklápění plachty, ze které by kostka visela na čemsi jako "stopce").Ale ani přesnější natáčení by pořád neřešilo problém s poklesem perigea....







 [upraveno 4.8.2019 01:29]
[upraveno 4.8.2019 01:29]