MARS PATHFINDER – druhá sonda programu DISCOVERY
Jan Toman
4.července 1997 úspěšně přistála na Marsu sonda Mars Pathfinder,
budiž tedy tento článek věnován pátému výročí této události.
Úvodem pár slov o tom, co předcházelo startu sondy Mars
Pathfinder
 Než
se budeme věnovat popisu a vědeckým cílům, bude dobře připomenout peripetie
výzkumu Marsu od roku 1975, kdy na Marsu přistály úspěšné sondy Viking, které
provedly rozsáhlý průzkum z oběžné dráhy a hlavně, jejich zásluhou byla
získána měření přímo z povrchu Marsu. Peníze na další výzkum ve druhé polovině
sedmdesátých let a první polovině let osmdesátých byly seškrtány, oživení v plánech
přišlo až v souvislosti s programem Planetary Observer, zahrnující
finančně méně náročné projekty. Jako první z nich byla studována a schválena
sonda Mars Observer se startovním datem rokem 1990. Termín startu se
posléze posunul až na rok 1992, změnám byla podrobena i samotná sonda a jak
už to chodí, výsledkem byla cena této „laciné“ mise ve výší jedné miliardy dolarů.
Případné kritiky by patrně umlčel příval nových informací od Marsu, ten se však
nekonal. Se sondou bylo ztraceno spojení právě při přechodu na oběžnou dráhu
a už se nepodařilo nikdy obnovit.
Než
se budeme věnovat popisu a vědeckým cílům, bude dobře připomenout peripetie
výzkumu Marsu od roku 1975, kdy na Marsu přistály úspěšné sondy Viking, které
provedly rozsáhlý průzkum z oběžné dráhy a hlavně, jejich zásluhou byla
získána měření přímo z povrchu Marsu. Peníze na další výzkum ve druhé polovině
sedmdesátých let a první polovině let osmdesátých byly seškrtány, oživení v plánech
přišlo až v souvislosti s programem Planetary Observer, zahrnující
finančně méně náročné projekty. Jako první z nich byla studována a schválena
sonda Mars Observer se startovním datem rokem 1990. Termín startu se
posléze posunul až na rok 1992, změnám byla podrobena i samotná sonda a jak
už to chodí, výsledkem byla cena této „laciné“ mise ve výší jedné miliardy dolarů.
Případné kritiky by patrně umlčel příval nových informací od Marsu, ten se však
nekonal. Se sondou bylo ztraceno spojení právě při přechodu na oběžnou dráhu
a už se nepodařilo nikdy obnovit.  Po
prvotním šoku ze ztráty drahého automatu byly opatrně vypouštěny „balónky“ v podobě
návrhů na vypuštění Mars Observeru 2, záhy však bylo jasné, že budoucí výzkum
se bude ubírat jinou cestou. Měly ji vytvořit cenově přijatelné sondy, kdy případné
selhání jedné bude kompenzováno úspěchem jiné. Projekt dostal označení MESUR.
Od roku 1999 mělo odstartovat postupně celkem 16 sond s úkolem přistát
na povrchu Marsu, poslední v roce 2003. Jejich předchůdcem, technologickým
demonstrátorem se měl stát Mars Pathfinder. Zůstalo však bohužel jenom u návrhu,
poněvadž se nepodařilo takto koncipovaný program zajistit finančně. Přežila
jenom sonda Mars Pathfinder, jedna ze dvou, které se na sklonku roku 1996 na
cestu k rudé planetě vydaly.
Po
prvotním šoku ze ztráty drahého automatu byly opatrně vypouštěny „balónky“ v podobě
návrhů na vypuštění Mars Observeru 2, záhy však bylo jasné, že budoucí výzkum
se bude ubírat jinou cestou. Měly ji vytvořit cenově přijatelné sondy, kdy případné
selhání jedné bude kompenzováno úspěchem jiné. Projekt dostal označení MESUR.
Od roku 1999 mělo odstartovat postupně celkem 16 sond s úkolem přistát
na povrchu Marsu, poslední v roce 2003. Jejich předchůdcem, technologickým
demonstrátorem se měl stát Mars Pathfinder. Zůstalo však bohužel jenom u návrhu,
poněvadž se nepodařilo takto koncipovaný program zajistit finančně. Přežila
jenom sonda Mars Pathfinder, jedna ze dvou, které se na sklonku roku 1996 na
cestu k rudé planetě vydaly.
Technický popis sondy
Tělo sondy Mars Pathfinder se skládá ze dvou částí –
meziplanetárního a přistávacího modulu s celkovou hmotností 890 kg při startu.
Meziplanetární modul ve tvaru válce o průměru 265 a výšce 150 cm slouží k
zajištění orientace a stabilizace při přeletu mezi planetami. Na jeho povrchu
jsou umístěny články slunečních baterii (až 450 W při startu, vlivem rostoucí
vzdálenosti od Slunce jejich výkon klesal). Korekce dráhy zajišťovalo celkem 8
korekčních motorků o tahu po 4,45 N. Palivem byl hydrazin (95 kg při startu).
 Přistávací
modul má tvar čtyřstěnu o hraně cca 90 cm se třemi hliníkovými panely, které
se po přistání rozevírají jako „okvětní lístky“. Slouží i jako sjezdová rampa
vozítka a na vnitřní ploše jsou sluneční články. V modulu je veškerá elektronika
včetně tepelné regulace, z něho jsou po přistání vysunuty vědecké přístroje.
Řízení sondy zabezpečuje komerčně vyráběný 32-bitový mikropočítač IBM Rad 600
s dodatečně instalovanou radiační ochranou. Celková kapacita paměti – 128
Mbyte je z 50 – ti procent přepsatelná, určená k záznamu naměřených dat.
Řídící jednotka přistávací části zajišťuje rovněž komunikaci a zpracování dat.
Přenos dat na Zemi se odehrává v pásmu X (8 GHz) přes směrovou anténu.
Při využití 70 – ti metrových antén systému DSN je možno použít rychlosti až
8,2 kbit./sec. Sluneční články sondě dodávaly 160 W el. energie, spolu se stříbro-zinkovým
dobíjecím akumulátorem má potom sonda za jasného dne k dispozici až 1200
Wh. Úspěšné přistání zabezpečuje v prvé řadě aerodynamický štít (rychlost
vstupu do atmosféry 7500metrů za sekundu), po jeho odhození, při snížení rychlosti
na 400 metrů za sekundu se rozevře brzdící padák o průměru 12,7 metru. To je
sonda ve výšce 12 – 6 km nad povrchem. Ve výšce 250 – ti metrů se po jeho odhození
(a po snížení rychlosti na 60 – 75 m/sec) nafoukne šest kulových polštářů tvořících
jakýsi airbag sondy. Závěrečné zbrzdění sondy potom obstará trojice motorů Thiokol
Star 5 na TPH, které sondu zpomalí na rychlost volného pádu (kolem 20 –ti m/sec).
Přistávací
modul má tvar čtyřstěnu o hraně cca 90 cm se třemi hliníkovými panely, které
se po přistání rozevírají jako „okvětní lístky“. Slouží i jako sjezdová rampa
vozítka a na vnitřní ploše jsou sluneční články. V modulu je veškerá elektronika
včetně tepelné regulace, z něho jsou po přistání vysunuty vědecké přístroje.
Řízení sondy zabezpečuje komerčně vyráběný 32-bitový mikropočítač IBM Rad 600
s dodatečně instalovanou radiační ochranou. Celková kapacita paměti – 128
Mbyte je z 50 – ti procent přepsatelná, určená k záznamu naměřených dat.
Řídící jednotka přistávací části zajišťuje rovněž komunikaci a zpracování dat.
Přenos dat na Zemi se odehrává v pásmu X (8 GHz) přes směrovou anténu.
Při využití 70 – ti metrových antén systému DSN je možno použít rychlosti až
8,2 kbit./sec. Sluneční články sondě dodávaly 160 W el. energie, spolu se stříbro-zinkovým
dobíjecím akumulátorem má potom sonda za jasného dne k dispozici až 1200
Wh. Úspěšné přistání zabezpečuje v prvé řadě aerodynamický štít (rychlost
vstupu do atmosféry 7500metrů za sekundu), po jeho odhození, při snížení rychlosti
na 400 metrů za sekundu se rozevře brzdící padák o průměru 12,7 metru. To je
sonda ve výšce 12 – 6 km nad povrchem. Ve výšce 250 – ti metrů se po jeho odhození
(a po snížení rychlosti na 60 – 75 m/sec) nafoukne šest kulových polštářů tvořících
jakýsi airbag sondy. Závěrečné zbrzdění sondy potom obstará trojice motorů Thiokol
Star 5 na TPH, které sondu zpomalí na rychlost volného pádu (kolem 20 –ti m/sec).
Přístrojové vybavení přistávací části - landeru
Kamera IMP (Imager for Mars Pathfinder) –
matice 256x256 CCD prvků, hmotnost 5,3 kg, spotřeba 2,6 W. Po přistání a rozevření
solárních panelů je vertikálně vysunuto rameno, na němž se ve výši přibližně 1
metru kamera nachází. Krokové motorky zajišťují její pohyb v azimutu (+ 180
až – 180 stupňů) i v elevaci (+83 až –72 stupňů). Optiku tvoří dva
triplety se světelností f/18 a ohniskovou vzdáleností 23 mm. Kamera je schopna
pořizovat snímky barevné i monochromatické s rozlišením 1 mrad.
Meteorologický experiment ASI/MET (Athmospheric Structure
Instrument/Meteorologic Experiment) zjišťuje údaje o atmosféře Marsu, a to již
při přistání. Ve výšce přibližně 100 km nad povrchem se zařízení aktivuje,
zjišťovány jsou údaje o teplotním a tlakovém profilu atmosféry. Měření
pokračují i po přistání, teplotní čidla jsou umístěna ve výšce 25, 50 a 100 cm
na rameni s kamerou.
Přístrojové vybavení roveru Sojourner
Kamera pro pořizování monochromatických snímků je umístěna
vpředu, na zadní části se potom nachází barevná kamera schopná zobrazit až
milimetrové detaily povrchu útvarů, zkoumaných přístrojem APXS.
Alfa-protonový a rentgenový spektrometr (Alpha proton X-ray
Spectrometer) se nachází na zadní části roveru na vyklápěcím mechanismu.
Hlavním úkolem je zjistit obsah většiny chemických prvků v horninách Marsu.
Hmotnost přístroje je 0,74 kg, spotřeba 0,8W.
 Samotný
rover Sojourner představuje novinku v průzkumu Marsu a vedle sovětských
Lunochodů ze šedesátých let je to teprve druhý případ využití automatického
mobilního prostředku při výzkumu povrchu jiného tělesa sluneční soustavy. Vyvinutý
byl pod názvem MFEX (Microrover Flight Experiment). Celková hmotnost
je 11,5 kg při rozměrech 63 x 48 cm a výšce 28 cm. Elektrickou energii dodávají
sluneční články, pokrývající celou horní část. Celkem je k dispozici asi
16,5 W, přičemž nominální odběr je na úrovni asi 10W. Rezervu představuje baterie
s kapacitou 12 Ah pro mimořádné situace. Činnost řídí 8 –mi bitový mikroprocesor
s rychlostí 100 tisíc instrukcí/sec a operační pamětí 0,576 Mbyte. Data
jsou odesílána v pásmu UHF na mateřskou přistávací sondu. Pro činnost je
vybavený autonomním systémem řízení. Po povrchu se pohybuje na šestikolovém
podvozku se zdvihem 13 cm. Akční rádius Sojourneru je 50 metrů.
Samotný
rover Sojourner představuje novinku v průzkumu Marsu a vedle sovětských
Lunochodů ze šedesátých let je to teprve druhý případ využití automatického
mobilního prostředku při výzkumu povrchu jiného tělesa sluneční soustavy. Vyvinutý
byl pod názvem MFEX (Microrover Flight Experiment). Celková hmotnost
je 11,5 kg při rozměrech 63 x 48 cm a výšce 28 cm. Elektrickou energii dodávají
sluneční články, pokrývající celou horní část. Celkem je k dispozici asi
16,5 W, přičemž nominální odběr je na úrovni asi 10W. Rezervu představuje baterie
s kapacitou 12 Ah pro mimořádné situace. Činnost řídí 8 –mi bitový mikroprocesor
s rychlostí 100 tisíc instrukcí/sec a operační pamětí 0,576 Mbyte. Data
jsou odesílána v pásmu UHF na mateřskou přistávací sondu. Pro činnost je
vybavený autonomním systémem řízení. Po povrchu se pohybuje na šestikolovém
podvozku se zdvihem 13 cm. Akční rádius Sojourneru je 50 metrů.
Start, průběh letu a přistání na Marsu (3.12. 1996 –
4.7. 1997)
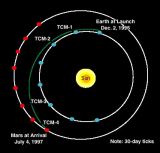 3.prosince
1996 odstartovala z rampy 17 B na mysu Canaveral raketa Delta 2 se sondou
Mars Pathfinder a vozítkem Sojourner na palubě. Po hodině letu na parkovací
dráze byl restartován 2. stupeň. Výsledkem byla přechodová dráha s parametry
180 – 3100 km, sklonem 36,4 stupňů k rovníku a dobou oběhu kolem Země 119
minut. 3. stupeň PAM-D poté zajistil navedení na přímou meziplanetární dráhu
k Marsu. Od Země se sonda vzdalovala rychlostí 3,9 km za sekundu.
3.prosince
1996 odstartovala z rampy 17 B na mysu Canaveral raketa Delta 2 se sondou
Mars Pathfinder a vozítkem Sojourner na palubě. Po hodině letu na parkovací
dráze byl restartován 2. stupeň. Výsledkem byla přechodová dráha s parametry
180 – 3100 km, sklonem 36,4 stupňů k rovníku a dobou oběhu kolem Země 119
minut. 3. stupeň PAM-D poté zajistil navedení na přímou meziplanetární dráhu
k Marsu. Od Země se sonda vzdalovala rychlostí 3,9 km za sekundu.
30. prosince 1996 byl Mars Pathfinder ve vzdálenosti 7,2 mil. km od
Země, probíhaly úspěšné testy zařízení vozítka Sojourner. Heliocentrická
rychlost sondy byla 32 km za sekundu.
10. ledna 1997 se uskutečnila letová korekce TCM – 1 (Trajectory
Correction Maneuver) zážehem dvou motorků na devadesát minut.
19. ledna 1997 pravděpodobně vlivem sluneční aktivity došlo
k výpadku systému řízení polohy.
 1.února
1997 byl Mars Pathfinder ve vzdálenosti 17,3 mil. km od Země a 118 mil. km od
Marsu, ke kterému se přibližoval rychlostí 17,5 km za sekundu. O tři dny později
byla úspěšně provedena druhá korekce dráhy, zajišťující navedení na dráhu mimo
Mars (součást planetární karantény). Po této dráze se po přistání Pathfinderu
dále pohybuje podpůrný meziplanetární modul sondy.
1.února
1997 byl Mars Pathfinder ve vzdálenosti 17,3 mil. km od Země a 118 mil. km od
Marsu, ke kterému se přibližoval rychlostí 17,5 km za sekundu. O tři dny později
byla úspěšně provedena druhá korekce dráhy, zajišťující navedení na dráhu mimo
Mars (součást planetární karantény). Po této dráze se po přistání Pathfinderu
dále pohybuje podpůrný meziplanetární modul sondy.
Počátkem května po provedené korekci TCM – 3 se Mars Pathfinder
nacházel ve vzdálenosti 37 mil. km od Marsu.
6. června 1997, měsíc před přistáním byla sonda 182. den letu ve
vzdálenosti 148 milionů kilometrů od Země, od Marsu ji dělila vzdálenost 14 mil.
kilometrů. Byla ukončena nahrávka povelů pro přistávací manévr.
20. června se uskutečnila poslední prověrka stavů sondy i roveru,
nebyly zjištěny žádné závady. K Marsu zbývá urazit vzdálenost 7 mil. km.
25. června 1997 – závěrečný korekční manévr, zajišťující
přistání sondy 4. července 1997 v oblasti Ares Vallis.
 4.
července 1997 den D sondy Mars Pathfinder. V 16.22 UT došlo k oddělení
meziplanetárního úseku, vstup do atmosféry se uskutečnil o půl hodiny později,
v 16.52 UT. ve výšce 125 km. V 16.54 UT se otevřel padák a o minutu později
se oddělil již nepotřebný tepelný štít. Necelých sto metrů nad povrchem seč
při rychlosti 61,5 m za sekundu zažehly brzdící motory, ve výšce 21 metrů se
oddělil závěs se sondou, která se o čtyři sekundy později dotkla povrchu Marsu
rychlostí 18 metrů za sekundu. V 16.56.50 UT přistála sonda Mars Pathfinder
v oblasti Ares Vallis (19,33°s.š.33,55°z.d.), jihovýchodně od sopek Tharsis.
Po prvním kontaktu ještě 15x poskočila a během 2,5 minut při tom urazila 0,6
kilometru. Hodinu po zastavení se začaly vyfukovat airbagy, kolem 18.00 UT se
rozevřely stabilizující lopatky. Na Zemi byla první zpráva o úspěšném přistání
přijata kolem 17.10 UT.
4.
července 1997 den D sondy Mars Pathfinder. V 16.22 UT došlo k oddělení
meziplanetárního úseku, vstup do atmosféry se uskutečnil o půl hodiny později,
v 16.52 UT. ve výšce 125 km. V 16.54 UT se otevřel padák a o minutu později
se oddělil již nepotřebný tepelný štít. Necelých sto metrů nad povrchem seč
při rychlosti 61,5 m za sekundu zažehly brzdící motory, ve výšce 21 metrů se
oddělil závěs se sondou, která se o čtyři sekundy později dotkla povrchu Marsu
rychlostí 18 metrů za sekundu. V 16.56.50 UT přistála sonda Mars Pathfinder
v oblasti Ares Vallis (19,33°s.š.33,55°z.d.), jihovýchodně od sopek Tharsis.
Po prvním kontaktu ještě 15x poskočila a během 2,5 minut při tom urazila 0,6
kilometru. Hodinu po zastavení se začaly vyfukovat airbagy, kolem 18.00 UT se
rozevřely stabilizující lopatky. Na Zemi byla první zpráva o úspěšném přistání
přijata kolem 17.10 UT.
Na povrchu Marsu (4.7. – 7.10. 1997)
 V místě
přistání bylo 3.02 ráno skutečného místního času (LTST). V 19.45 UT (v 5.45
LTST) vyšlo Slunce. Zhruba v té době se automaticky zapojil vysílač, první
informace byly přijímány od 21.09 do 22.13 UT, spojení přes směrovou anténu
začalo krátce před půlnocí UT. Po hodině, kolem 01.00 UT se měly vysunout obě
rampy a po televizní kontrole měl ve 3.58 UT (kolem druhé hodiny odpoledne místního
času) Sojourner sjet na povrch. V 8.45 UT (18.20 LTST) Slunce zapadalo, avšak
Sojourner stále vězel na svém místě, protože vak se pod jeho plošinou nedokonale
vyprázdnil a ta zůstávala stále příliš vysoko.
V místě
přistání bylo 3.02 ráno skutečného místního času (LTST). V 19.45 UT (v 5.45
LTST) vyšlo Slunce. Zhruba v té době se automaticky zapojil vysílač, první
informace byly přijímány od 21.09 do 22.13 UT, spojení přes směrovou anténu
začalo krátce před půlnocí UT. Po hodině, kolem 01.00 UT se měly vysunout obě
rampy a po televizní kontrole měl ve 3.58 UT (kolem druhé hodiny odpoledne místního
času) Sojourner sjet na povrch. V 8.45 UT (18.20 LTST) Slunce zapadalo, avšak
Sojourner stále vězel na svém místě, protože vak se pod jeho plošinou nedokonale
vyprázdnil a ta zůstávala stále příliš vysoko.  Rovněž
se objevil problém se spojením s roverem, způsobený modemem spojujícím
řídící počítač Sojourneru s jeho vysílačem. 5. července došlo na přejmenování
sondy Mars Pathfinder na Carl Sagan Memorial Station (CSMS), po známém americkém
exobiologovi a popularizátorovi astronomie. Teprve o den později kolem půlnoci
si bylo pozemní středisko jisté, že spojení s vozítkem funguje, rovněž
nevyfouklý ochranný polštář již nepředstavoval problém. Na základě snímků bylo
rozhodnuto, že rover ze svého stanoviště na CSMS vycouvá. To se uskutečnilo
6. července těsně před 6.00 UT. Po rampě se sunul rychlostí jednoho centimetru
za sekundu. Deset centimetrů před koncem rampy se zastavil a fotografoval..
V marťanském písku byly zřetelně vyditelné otisky jeho kol. Ještě téhož dne
poprvé použil přístroje APXS k prvému rozboru složení půdy. V těchto dnech
také kulminoval zájem o tuto expedici – 8. července bylo na síti Internet zaznamenáno
47 milionů připojení.
Rovněž
se objevil problém se spojením s roverem, způsobený modemem spojujícím
řídící počítač Sojourneru s jeho vysílačem. 5. července došlo na přejmenování
sondy Mars Pathfinder na Carl Sagan Memorial Station (CSMS), po známém americkém
exobiologovi a popularizátorovi astronomie. Teprve o den později kolem půlnoci
si bylo pozemní středisko jisté, že spojení s vozítkem funguje, rovněž
nevyfouklý ochranný polštář již nepředstavoval problém. Na základě snímků bylo
rozhodnuto, že rover ze svého stanoviště na CSMS vycouvá. To se uskutečnilo
6. července těsně před 6.00 UT. Po rampě se sunul rychlostí jednoho centimetru
za sekundu. Deset centimetrů před koncem rampy se zastavil a fotografoval..
V marťanském písku byly zřetelně vyditelné otisky jeho kol. Ještě téhož dne
poprvé použil přístroje APXS k prvému rozboru složení půdy. V těchto dnech
také kulminoval zájem o tuto expedici – 8. července bylo na síti Internet zaznamenáno
47 milionů připojení.
Následující den začal Sojourner tancem.  Zvedl
totiž pět ze svých šesti kol a na tom šestém se začal otáčet. Nejdříve na jednu,
potom i na druhou stranu. Vědci takto na dálku sledovali, jak hluboko do sypkého
materiálu se dá proniknout tímto způsobem. Mezitím byly na snímcích pořízených
CSMS vytipovány zajímavé cíle pro rover, zároveň byly postupně pojmenovány dominanty
okolí. A tak se svět dozvěděl, že na Marsu byl objeven Yogi, Twin Peaks, Barnacle
Bill a další pozoruhodnosti. A právě Barnacle Bill – kámen vysoký asi 25 cm
se stal dalším cílem roveru. Úkolem tentokrát bylo provést analýzu pomoci APXS.
Zjištěné údaje byly předávány rychlostí 8,5 kbit/sec na Zemi. Rovněž počasí
průzkumu přálo. Teplota kolísala mezi –12 –ti stupni ve dne a –40-ti stupni
v noci, tlak se pohyboval okolo 6,8 milibaru. K 9. červenci bylo do řídícího
střediska předáno na 1500 snímků a dva kompletní rozbory provedené přístrojem
APXS. Mezi nejúspěšnější dny patří 14-15. červenec, kdy bylo na Zemi předáno
celkem na 90 Mbitů.
Zvedl
totiž pět ze svých šesti kol a na tom šestém se začal otáčet. Nejdříve na jednu,
potom i na druhou stranu. Vědci takto na dálku sledovali, jak hluboko do sypkého
materiálu se dá proniknout tímto způsobem. Mezitím byly na snímcích pořízených
CSMS vytipovány zajímavé cíle pro rover, zároveň byly postupně pojmenovány dominanty
okolí. A tak se svět dozvěděl, že na Marsu byl objeven Yogi, Twin Peaks, Barnacle
Bill a další pozoruhodnosti. A právě Barnacle Bill – kámen vysoký asi 25 cm
se stal dalším cílem roveru. Úkolem tentokrát bylo provést analýzu pomoci APXS.
Zjištěné údaje byly předávány rychlostí 8,5 kbit/sec na Zemi. Rovněž počasí
průzkumu přálo. Teplota kolísala mezi –12 –ti stupni ve dne a –40-ti stupni
v noci, tlak se pohyboval okolo 6,8 milibaru. K 9. červenci bylo do řídícího
střediska předáno na 1500 snímků a dva kompletní rozbory provedené přístrojem
APXS. Mezi nejúspěšnější dny patří 14-15. červenec, kdy bylo na Zemi předáno
celkem na 90 Mbitů. 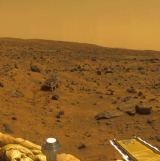 Také
ostatní dny bylo denně předáváno kolem 40-50 Mbit dat. Přenos byl však také
několikrát neplánovaně přerušen. Došlo k tomu poprvé 11. července, následně
potom o tři dny později v důsledku resetu řídícího počítače přistávacího
modulu. 10. července došlo k mediálně vděčné události, totiž první dopravní
nehodě v historii Marsu. Sojourner při těsném přiblížení se k balvanu
Yogi zůstal nebezpečně nakloněný a v dalším postupu ho zastavil automatický
bezpečnostní systém. Po měsíci pobytu na Marsu, 4. srpna skončila základní část
mise. Všechny systémy byly v dobrém stavu, sonda i Sojourner mohli pokračovat
v činnosti. Za 30 solů (marťanských dnů) bylo odesláno 1,2 Gbitů dat a
9700 snímků. Sojourner najezdil 52 metrů a mj. získal 384 snímků. Následující
dva dny strávila sonda v hibernovaném stavu dobíjením akumulátorů. Po
obnovení činnosti pokračoval přenos snímků tzv. superpanoramatu (celkem 3000
snímků – cca 1Gbit dat), Sojourner se vydal na cestu ke kameni s poetickým
názvem Shark. Další tři týdny trvalo, aby dovršil jubilejní stý metr uražené
celkové vzdálenosti. Měla – li být úspěšnost vyjádřena procentuelně, potom by
k 26. září byly úkoly splněny na 250 procent u přistávací části a na 1000 u
roveru, ten již 10x překročil i ty nejoptimističtější odhady doby funkčnosti.
Také
ostatní dny bylo denně předáváno kolem 40-50 Mbit dat. Přenos byl však také
několikrát neplánovaně přerušen. Došlo k tomu poprvé 11. července, následně
potom o tři dny později v důsledku resetu řídícího počítače přistávacího
modulu. 10. července došlo k mediálně vděčné události, totiž první dopravní
nehodě v historii Marsu. Sojourner při těsném přiblížení se k balvanu
Yogi zůstal nebezpečně nakloněný a v dalším postupu ho zastavil automatický
bezpečnostní systém. Po měsíci pobytu na Marsu, 4. srpna skončila základní část
mise. Všechny systémy byly v dobrém stavu, sonda i Sojourner mohli pokračovat
v činnosti. Za 30 solů (marťanských dnů) bylo odesláno 1,2 Gbitů dat a
9700 snímků. Sojourner najezdil 52 metrů a mj. získal 384 snímků. Následující
dva dny strávila sonda v hibernovaném stavu dobíjením akumulátorů. Po
obnovení činnosti pokračoval přenos snímků tzv. superpanoramatu (celkem 3000
snímků – cca 1Gbit dat), Sojourner se vydal na cestu ke kameni s poetickým
názvem Shark. Další tři týdny trvalo, aby dovršil jubilejní stý metr uražené
celkové vzdálenosti. Měla – li být úspěšnost vyjádřena procentuelně, potom by
k 26. září byly úkoly splněny na 250 procent u přistávací části a na 1000 u
roveru, ten již 10x překročil i ty nejoptimističtější odhady doby funkčnosti.
 27.
září 1997 skončil poslední úspěšný přenos dat ze sondy Carl Sagan Memorial Station
– Mars Pathfinder. 1. října byl vyslán povel k přepnutí na záložní vysílač.
Po počátečním mlčení se podařilo v 8.23 UT signál (jen nosnou vlnu) zachytit
a přijímat asi 20 minut. Při druhém pokusu se sonda již neozvala. Druhý den
se technici pokusili získat data z pomocného vysílače sondy Mars Pathfinder.
27.
září 1997 skončil poslední úspěšný přenos dat ze sondy Carl Sagan Memorial Station
– Mars Pathfinder. 1. října byl vyslán povel k přepnutí na záložní vysílač.
Po počátečním mlčení se podařilo v 8.23 UT signál (jen nosnou vlnu) zachytit
a přijímat asi 20 minut. Při druhém pokusu se sonda již neozvala. Druhý den
se technici pokusili získat data z pomocného vysílače sondy Mars Pathfinder.
 Signál
byl zpočátku registrován, avšak v 11.30 UT se vysílač odpojil, počítač měl však
zřejmě dostatek energie k činnosti podle obvyklého režimu. Protože není
vyloučeno, že došlo k poruše akumulátoru, byly vyslány povely „naslepo“
pro přepnutí do režimu, při kterém je sonda napájena přímo ze slunečních panelů.
Signál
byl zpočátku registrován, avšak v 11.30 UT se vysílač odpojil, počítač měl však
zřejmě dostatek energie k činnosti podle obvyklého režimu. Protože není
vyloučeno, že došlo k poruše akumulátoru, byly vyslány povely „naslepo“
pro přepnutí do režimu, při kterém je sonda napájena přímo ze slunečních panelů.
7.října 1997 ve 14.21 UT po čtyřech dnech mlčení se podařilo
navázat kontakt se sondou Mars Pathfinder. Španělská stanice systému DSN o průměru
34 metrů přijímala po dobu 15-ti minut silný signál hlavního vysílače. Byl to
poslední pozdrav z povrchu rudé planety do dnešního dne. Celkem sonda předala
2,6 Gbitů dat včetně 16-ti tisíc snímků z Pathfinderu, 550-ti ze Sojourneru a
16 chemických analýz.
Přejme si, aby následovníci, kteří se mají podle plánu vydat na
cestu již za rok byli stejně tak úspěšní!
Jan Toman
Aktualizováno : 09.07.2002
[ Obsah | Nepilotované
kosmické lety | Program Mars (USA) | Mars
Pathfinder ]
Pokud není uvedeno jinak, jsou použité fotografie z NASA (viz. Using NASA Imagery) a dalších volně přístupných zdrojů.
(originál je na https://mek.kosmo.cz/sondy/usa/mars/mpf05.htm)












