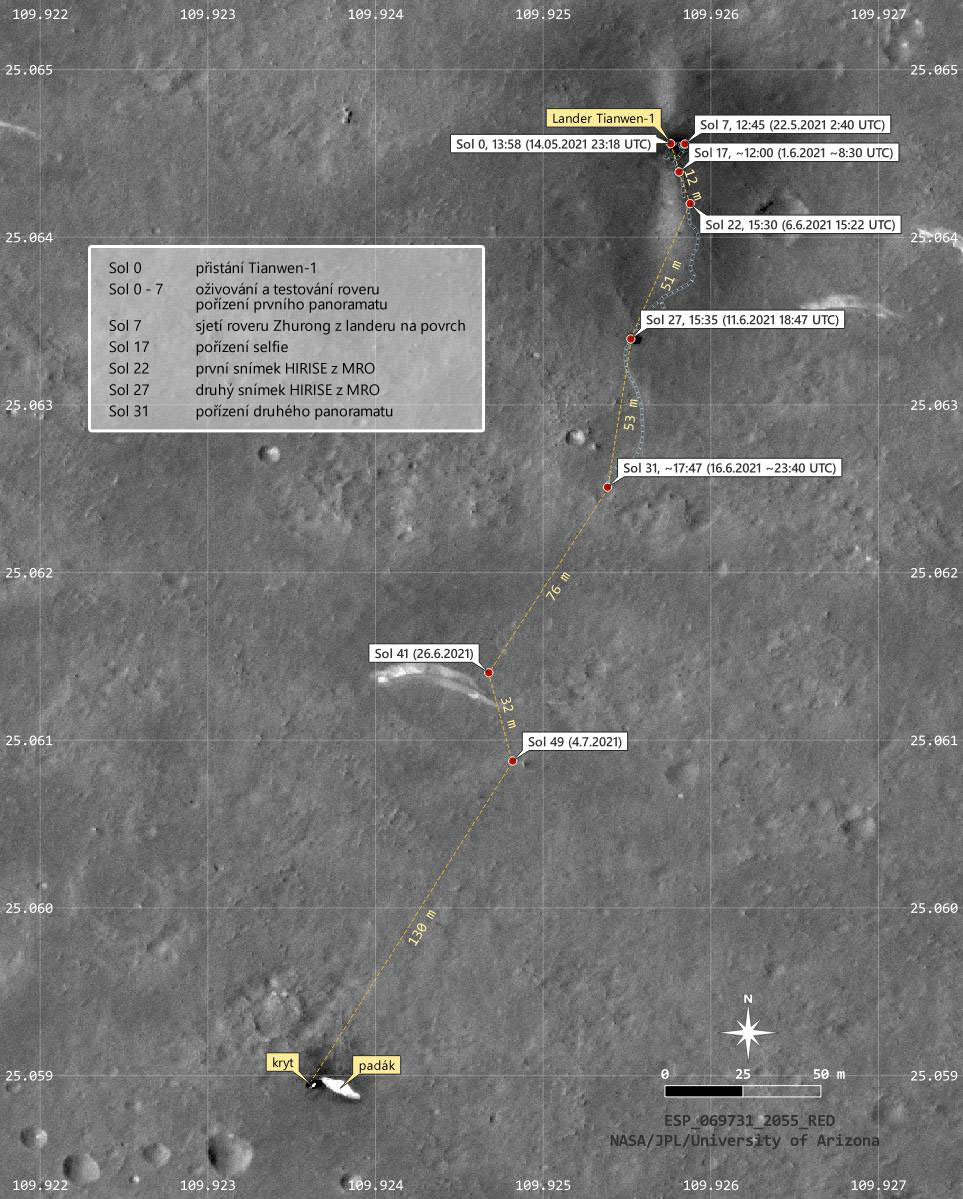
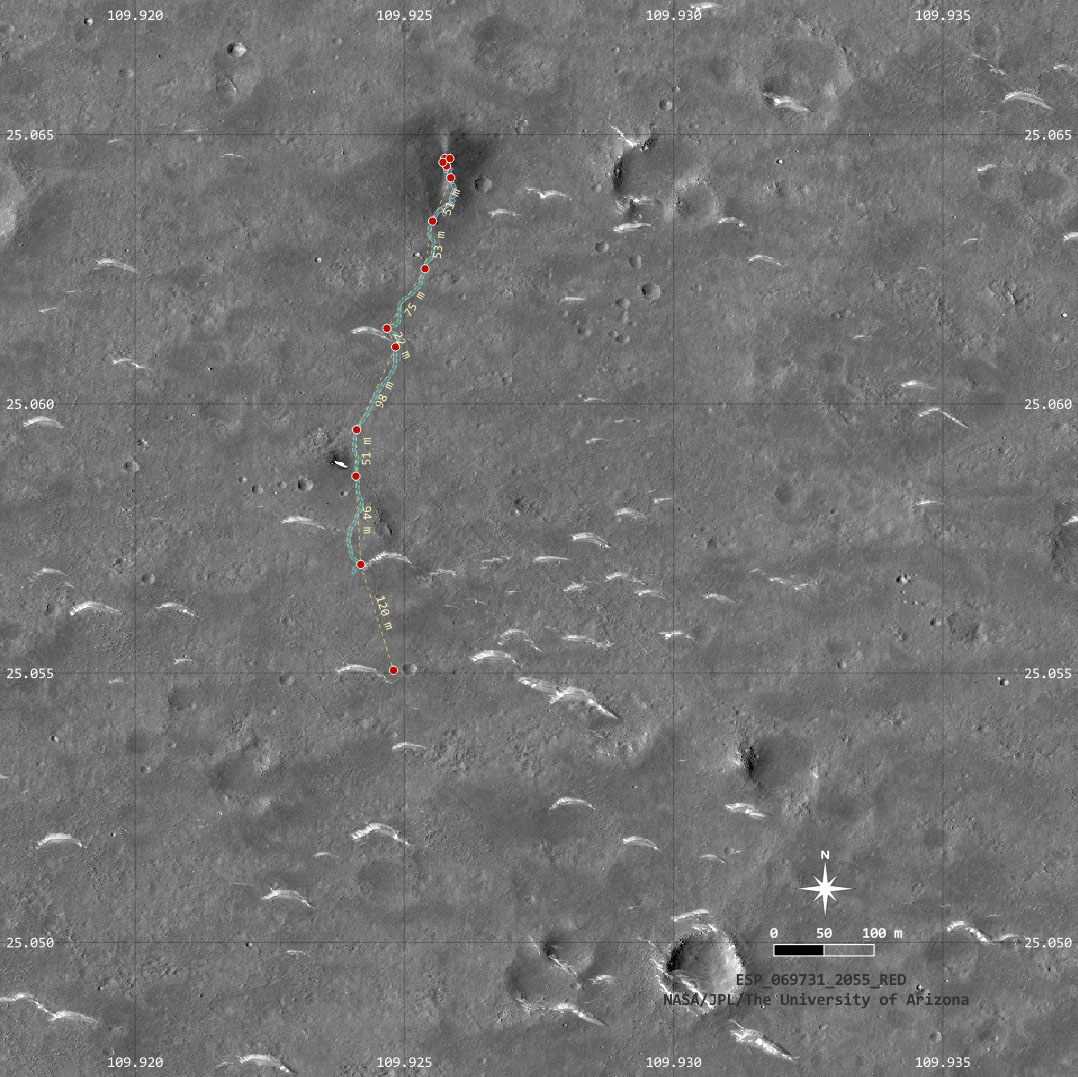
citace 11.7.2021 - 11:23 - Honza Vacek:Z údajů, které se mi podařilo dohledat, jsem vytvořil mapku pohybu roveru. Není v ní zakreslená skutečná cesta, kudy rover jel, to půjde zjistit až podle novějších obrázků HIRISE z MRO, kde jsou vidět stopy od kol roveru, ale pouze známé polohy a vzdálenosti mezi nimi. Pokud tam jsou nějaké nepřesnosti, tak se za ně omlouvám.
Super, že něco takového děláte a přinášíte informace, kterých (z čínských zdrojů) není nikdy dost. Vím, že v přepočtu časů je obrovský chaos, hlavně když jsou některé informace z čínských zdrojů s pekingským časem a zdrojů z jiných časových pásem a je to dost na hlavu to pořád přepočítávat. Pokud na Vaší mapě vezmeme den přistání 14. května 2021 jako sol 0, pak by ostatní dny (soly) měly být posunuté.
14. 5. - sol 0
6. 6. - sol 23
11. 6. - sol 28
16. 6. - sol 33
26. 6. - sol 43
4. 7. - sol 51
.
[upraveno 11.7.2021 16:03]
Hezkou infografiku cesty vozítka Zhurong [Ču-žung] s místy pořízení zveřejněných snímků vytvořil "wlr2678". Obrázek ve vysokém rozlišení můžete stáhnout na odkazu zdroje výše nebo menší náhled i zde: http://imgway.cz/v/Ppv.jpg (Originál má 50 MB!)
citace 11.7.2021 - 15:31 - MiraH:
Super, že něco takového děláte a přinášíte informace, kterých (z čínských zdrojů) není nikdy dost. Vím, že v přepočtu časů je obrovský chaos, hlavně když jsou některé informace z čínských zdrojů s pekingským časem a zdrojů z jiných časových pásem a je to dost na hlavu to pořád přepočítávat. Pokud na Vaší mapě vezmeme den přistání 14. května 2021 jako sol 0, pak by ostatní dny (soly) měly být posunuté.
14. 5. - sol 0
6. 6. - sol 23
11. 6. - sol 28
16. 6. - sol 33
26. 6. - sol 43
4. 7. - sol 51
.
[upraveno 11.7.2021 16:03]
No, on v tom zase až tak moc chaos není a pokud teď napíšu nějaký nesmysl, tak mě opravte. Soly se počítají v marsovských dnech, nikoliv pozemských. Počítat se začínají buď od Sol 0 nebo od Sol 1, ale většina posledních misí alespoň těch amerických mají počátek v Sol 0. Sol se mění o půlnoci LMST, tzn. o půlnoci místního středního slunečního času.
Na výpočet LMST existuje naprosto přesný algoritmus, takže pokud známe přes pozemský čas např. v UTC, převedeme ho alespoň na TT, lépe na TDB a z něho se spočítá MSD (Mars Sol Date), což je obdoba juliánského datování na zemi a ten pak ještě posunume o příslušnou aerocentrickou délku místa přistání. Zhurong přistál 14.05.2021 23:18, tomu odpovídá MSD v LMST 52387,58229598 čili 13:58 LMST. To označme jako Sol 0. První snímek HIRISE byl pořízený 06.06.2021 15:23 UTC (52409.6458794). Je to tedy Sol 22 a podobně druhý snímek 11.06.2021 18:47 UTC (52414,649977) čili Sol 27.
Ty ostatní časy už nejsou jisté, protože tam je uvedený pouze datum a ani není jisté, jestli to náhodou není pekingský čas. Tam už opravdu může být posun v solech.
Takže podle mého ta infografika není úplně správně, co se solů týká. Druhou výhradu bych k ní měl co se týká ukazatele směru na sever. Ty obrázky vycházejí ze snímků HIRISE a ty jsou dvojího druhu. Jednak v „surovém“ tak jak je nasnímala sonda anebo jsou převzorkované do mapové projekce. HIRISE požívají dvě projekce. Pro šířky -65° až 65° se používá válcová ekvidistantní projekce a pro ty vyšší šířky polární stereografická. Snímky Zhurongu jsou tedy v té válcové ekvidistantní projekci. Z tohoto snímku vychází i ta infografika tam nemůže být sever nikde jinde než nahoře. Zkusil jsem si ty snímky překrýt a nezjistil jsem, že by byly pootočené, čili směr sever je tam špatně.
Ale jak říkám, mohu se mýlit a mít to špatně já. Chyb dělám bezpočet a pak se divím.
citace:No, on v tom zase až tak moc chaos není a pokud teď napíšu nějaký nesmysl, tak mě opravte. Soly se počítají v marsovských dnech, nikoliv pozemských. Počítat se začínají buď od Sol 0 nebo od Sol 1, ale většina posledních misí alespoň těch amerických mají počátek v Sol 0. Sol se mění o půlnoci LMST, tzn. o půlnoci místního středního slunečního času.
Jsem hlupák a sypu si popel na hlavu! Až teď jsem si uvědomil, že sol je o 40 minut delší než pozemský den, takže to nejde tak jednoduše přepočítávat. Samozřejmě máte pravdu. Ale jinak je ten převod na mě moc složitý, takže v tom pokračujte, protože je to zajímavé a přínosné.
citace: Druhou výhradu bych k ní měl co se týká ukazatele směru na sever. ... Z tohoto snímku vychází i ta infografika tam nemůže být sever nikde jinde než nahoře. Zkusil jsem si ty snímky překrýt a nezjistil jsem, že by byly pootočené, čili směr sever je tam špatně.
Tak i tady máte pravdu. Nemám takové znalosti jako Vy, ale vycházím z toho, že výtrysky zbytků pohonných hmot, které jsou jasně viditelné, směřují "přibližně" (!) na sever a jih. Takže ano, směr severu na infografice od "wlr2678" je špatně.
citace 11.7.2021 - 18:25 - MiraH:
Tak i tady máte pravdu. Nemám takové znalosti jako Vy, ale vycházím z toho, že výtrysky zbytků pohonných hmot, které jsou jasně viditelné, směřují "přibližně" (!) na sever a jih. Takže ano, směr severu na infografice od "wlr2678" je špatně.
Ale ona ta infografika je pěkná, protože je z ní vidět, co kdy rover snímkoval a jak postupuje, ten směr sever je už jenom pro většinu lidí zanedbatelný detail a ani to většinou nezaregistrují. A ty soly +/- den nejsou až tak moc důležité, protože rover se stejně na těch místech zdržel nějakou dobu.
Aktualizoval jsem a doplnil mapku pohybu roveru Zhurong. U dvou míst jsem se pak pokusil odhadnout i čas, kdy tam rover stál, ale je to jenom moje spekulace. Jedná se o Sol 17, kdy bylo pořízena společná fotografie roveru a landeru a pak Sol 31, kdy bylo vytvořené druhé panorama se zapadajícím Sluncem.
Sol 17 – selfie: tady se mi podařilo dohledat jenom to, že snímek byl pořízen 1.6 ve vzdálenosti 10 m od landeru. To místo je na snímku HIRISE docela dobře identifikovatelné podle stop po kolech, které tam rover zanechal. Podle stínů na snímku a z videa roveru, kdy položil kameru na povrch, to vypadá že tou dobou bylo Slunce téměř v zenitu, čili snímek byl pořízen někdy kolem 12:00 pravého slunečního času LTST. Tou dobou mělo Slunce výšku nad obzorem 84,5° a azimut 174˘. 1.6. se ale LTST od LMST příliš neliší, je tam diference necelé tři minuty. Odpovídající čas na Zemi je pak 1.6. 8:30 UTC. Ta nejistota v čase by neměla být moc veliká, protože např. o hodinu a půl později má Slunce už výšku jenom 69° a to by se projevilo na delších stínech.
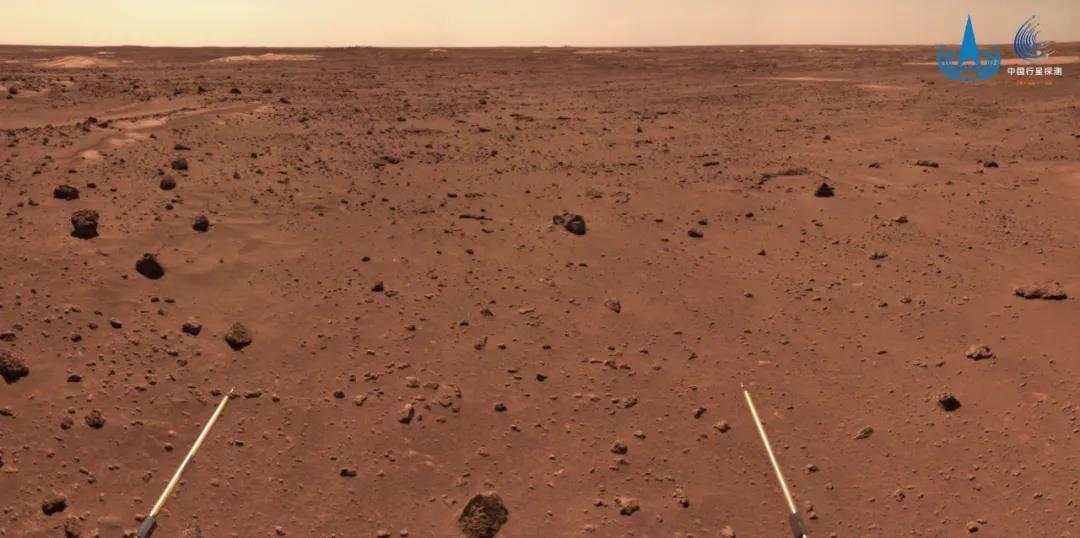
Sol 31: tady vycházím z toho, jak panorama vypadá a dále z toho, že bylo pořízeno 16.6. nejspíše pekingského času (UTC+8). Podle stínů bych si tipnul, že ke snímkování panoramatu došlo odpoledne místního času marsovského LMST. Odhaduji, že první snímek byl směr východ, potom následovalo snímkování sever a jih a jako poslední směr západ směrem k zapadajícímu Slunci. Na této části panoramatu již nejsou žádné ostré stíny, protože Slunce bylo již nízko nad obzorem a je to spíše jenom difusní světlo. Je tam ale světelný kruh ve směru zapadajícího Slunce. Střed toho kruhu má azimut 288°. Tenhle azimut mělo Slunce v místě roveru v 17:47 LMST, kdy bylo 11,5° nad obzorem. Tomu pak odpovídá pozemský čas 15.6. 23:40 UTC nebo 16.6. 7:40 pekingského času.
Jak už jsem ale psal na začátku, je to jenom můj odhad a ve skutečnosti to mohlo být poněkud jinak.
citace 15.7.2021 - 20:12 - MiraH:Super. Je to technická zajímavost. Kdoví, jestli jen "jedou kolem", nebo to byl cíl.
Padák asi jedním z cílů byl (na Unmanned Spaceflight jsem zaznamenal hned krátce po přistání, že jedním z cílů má být inspekce padáku), ale určitě ne konečným. Vypadá to, že rover pokračuje dále na jih.
Hodinu po půlnoci, 16.7. 01:11 UTC, Zhurong ukončí sol 60 a tím vstoupí do poslední třetiny své mise, která je plánovaná na 90 solů. Jestli dojde k jejímu prodloužení, ještě uvidíme.
Za dosavadních 60 solů urazil vzdálenost přes 450 metrů a z dostupných informací lze usuzovat, že je stále v dobré kondici. Podle tohoto článku (tedy jestli jsem to pochopil správně, ty překlady z čínštiny jsou občas divné) je jeho pohyb rozvržený do třídenních cyklů, které zahrnují prohlídku a vyhodnocení terénu, detekce překážek, plánování další trasy a pak vlastní pohyb vozítka. Komunikační schopnosti vozítka jsou však oproti očekávání mnohem lepší a třídenní cyklus bylo možné zkrátit na jeden den, což umožnilo rychlejší pohyb.
Dalším cílem čínského marsovského programu má být Sample Return Mise.
Docela jede rychle, mě by zajímala funkčnost georadaru Mars Rover Penetrating Radar ( RoPeR ).
Zajímavé by bylo také vědět co měří:
Magnetometr Mars Rover ( RoMAG )
Je to pár dní, co jsem četl jeden článek, kde se jeden z týmu vývojářů vyjadřoval k pohybu roveru. Bohužel, jsem zrovna pospíchal, takže jsem ten článek prolétl jenom zběžně a teď ho nemohu najít, ale až na něj zase narazím, tak sem dám určitě odkaz.
V tom článku bylo asi toto (pokud něco uvedu špatně, tak mě nekamenujte, jak říkám, četl jsem to hodně narychlo): oproti roveru na Měsíci má Zhurong vylepšený autonomní systém, který umožňuje, aby se pohyboval rychleji v porovnání s měsíčním roverem. Kromě toho, autonomní systém Zhurongu umožňuje i to, aby určitou dobu pracoval zcela samostatně bez povelů ze Země. Umí si sám vyhledávat cíle a analyzovat i vytyčovat trasu.
To, že pospíchají na jih bych spíše přičítal ani ne tomu, aby předvedli, jak rychle se rover dokáže pohybovat, ale spíše tomu, že je na jihu asi zajímají nějaké útvary, na které se chtějí podívat, a chtějí to stihnout do těch 90 solů, protože co bude s roveren pak, není vůbec jisté.
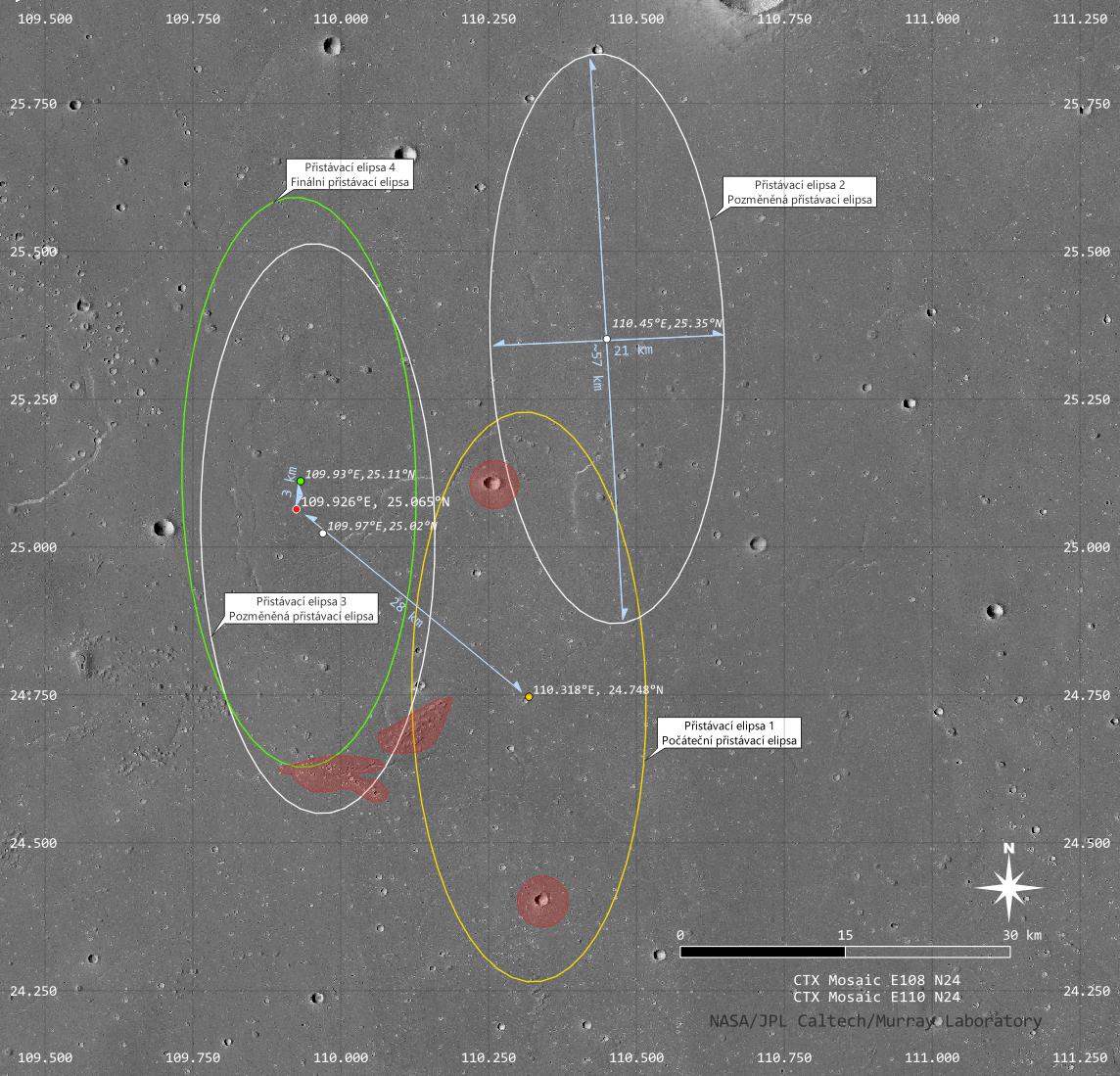
Ještě bych se v krátkosti vrátil k místu přistání, přesněji jak vypadala přistávací elipsa Tinwaen-1. Většinou se uvádí, že střed elipsy měl souřadnice 24,748 s. š., 110,318 v. d., měla rozměry 100 km x 40km a skutečné místo přistání leží ve vzdálenosti asi 40 km od středu elipsy. Pokud ovšem ze souřadnic středu elipsy a místa přistání spočítáme vzdálenost, vyjde 28 km. Říkal jsem si tedy, že až budu mít chvíli času, tak zkusím dohledat, jak to vlastně s tou přistávací elipsou je, k čemuž došlo včera večer. Výsledkem je následující mapka. Ta je složená ze dvou CTX snímků z MRO a pro vytvoření byl použitý GIS program QGIS. GIS jsem použil z toho důvodu, že snímky CTX, HiRISE a další, pokud jsou ve formátu TIF nebo JP2, obsahují georeferenční hlavičku GeoTiff, ve které jsou uložené parametry mapové projekce snímku. Tyto obrázky jsou pak zpracovatelné GIS systémy, protože ty zase umějí povětšinou nejenom zeměkouli, ale i další tělesa sluneční soustavy, tedy i Mars. Výhodou pak je, že se v nich snadno dají například odečítat souřadnice nebo přesně měřit vzdálenosti.
Výsledkem je uvedená mapka, která je zhotovena na základě několika jiných obrázků, které se mi podařilo dohledat. Přesnost umístění elips by neměla být horší než jednotky kilometrů. Z toho obrázku vyšly rozměry přistávací elipsy 57 km x 21 km. Phil Stooke z Planetary Society na fóru usf uvádí rozměry 60x20 km, což odpovídá tomu obrázku. Odvolává se přitom na Polytechnickou univerzitu v Hong Kongu, kde přistání počítali.
Na obrázku jsou celkem 4 elipsy. Ta původní č.1, označená žlutou barvou, je ta nejčastěji zmiňovaná o souřadnicích středu 24,748 N, 110,318 E. Do té ale nakonec sonda TW-1 údajně nepřistávala. Důvodem byly dva poměrně velké krátery uvnitř elipsy, které byly vyhodnocené jako příliš veliké riziko pro přistání. Byly tedy vybrané dvě další elipsy č.2 a 3 (bílá barva), které se vyhnuly zmíněným kráterům. Nejspíše z vědeckého hlediska byla pro přistání zajímavější ta západní, ale i ta doznala změny. Na jejím jižním konci je hodně nerovný terén, který by mohl při přistání způsobit komplikace. Elipsa tedy byla posunuta přibližně o 5 km severněji. Výsledkem je elipsa č. 4 označená zelenou barvou. A to je finální elipsa, do které měl TW-1 přistávat. Místo přistání pak leží o necelé 3 km jižněji od středu elipsy.
Jinak k 17. červenci měl Zhurong překonat celkovou vzdálenost 509 m a měl by být u další duny jižně od padáku.
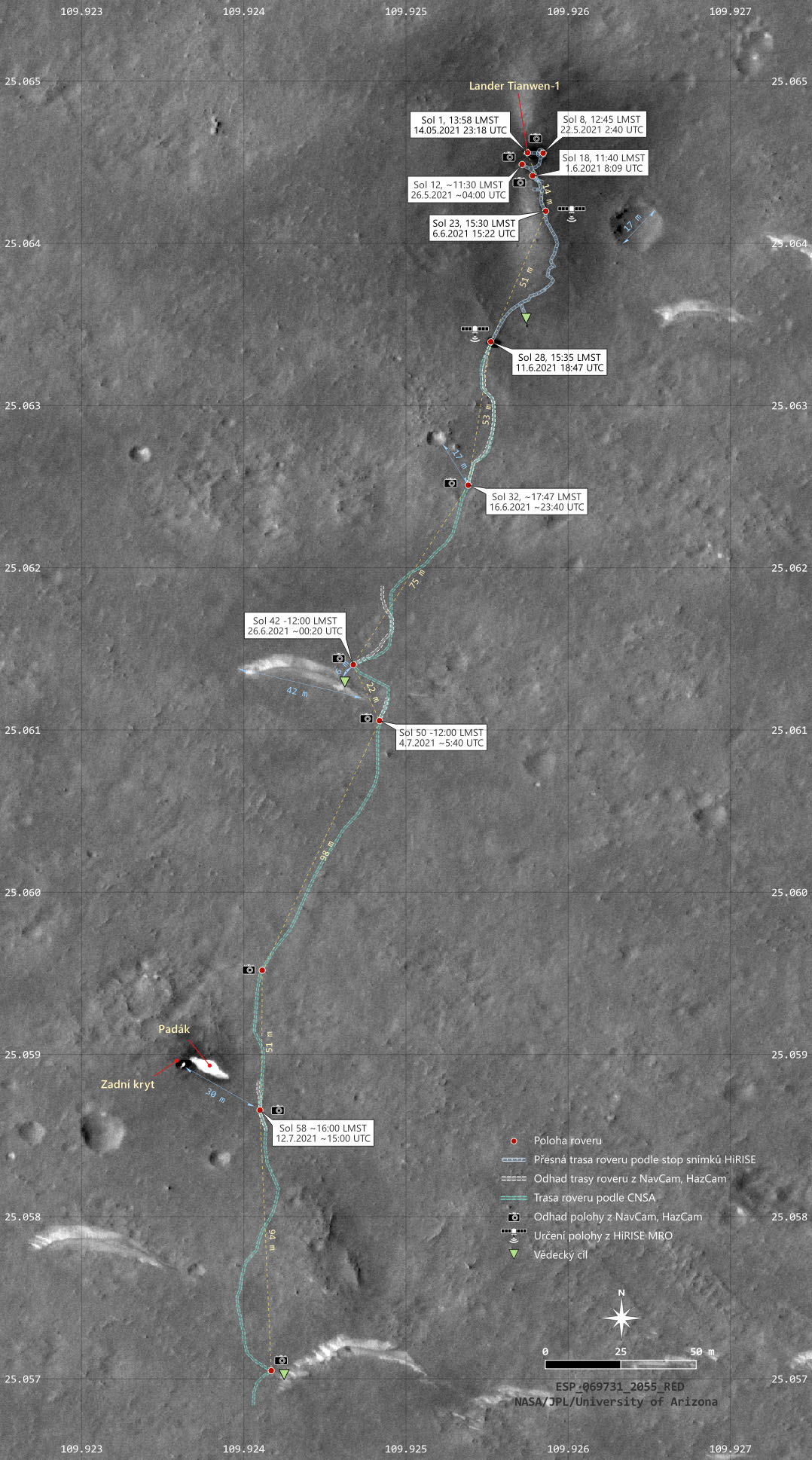
Aktualizace jednotlivých solů pro rover Zhurong. Časy LMST, u kterých je ~ jsou jenom přibližné a LMST je odhadnutý z osvícení snímku. ~12:00 LMST znamená někdy kolem poledne a ~15:00 LMST značí odpoledne
Podle tohoto článku rover urazil celkem 585 m. Denně pořizuje snímky pomocí kamer NavCam a HazCam (ty kamery se u čínského roveru jmenují trochu jinak, ale používám zažitou terminologii) a provádí vědecká měření (podpovrchový radar, meteorologická měření, měření magnetického pole atd.), ale nic konkrétnějšího. Jenom zmiňuje, že vědeckým cílem po cestě byly kameny a duny.
Ještě malou poznámku k číslování solů. Čínská média včetně CNSA pojem sol přímo nepoužívají. Používají obrat n-tý den na Marsu a 1. den na Marsu byl den přistání. Číslování solů je tedy od jedničky.
Všechny americké poslední mise používají číslování od 0. Proto také byl chaos v různých mapkách pohybu roveru, kde číslování bylo od 0, ale počet solů na Marsu byl převzatý z čínských médií, takže to potom nesedělo. Zatím byly pouze tři mise, kde číslování solů začínalo jedničkou. Pathfinder a oba MERy.
Jenom pro zajímavost. Do solu 43, pokud vyjdeme z toho, že rover se vydal na cestu až po pořízení selfie, vychází průměrná rychlost roveru necelých 9 m/sol. Ale od 43 solu rover zrychlil a pohybuje se konstantní průměrnou rychlostí necelých 17 m/sol. Od přistávacího modulu je vzdálený 465 m.
Rover Zhurong se nyní nachází přibližně 560 m jižně od místa přistání. K datu 30.7.2021 (Sol 75) urazil celkem 708 m. Nyní vjíždí do oblasti, která má mnohem členitější terén než doposud absolvovaná trasa. Čínští vědci předpokládají, že právě tato oblast byla kdysi pobřežím oceánu a je zřejmě i primárním vědeckým cílem roveru.
Podle směru pohybu to vypadá, že Zhurong by mohl směřovat k velkému kráteru na jihovýchodě. Ale to je jenom moje domněnka. Kráter má průměr 85 m a od poslední známé pozice roveru je vzdálený 410 m.
Data z orbiteru i roveru jsou zatím v chráněném režimu. Jakou dobu přesně trvá chráněný režim si již nepamatuji, ale jsou to řádově měsíce. Během této doby jsou data k dispozici pouze čínským vědeckým pracovištím. Po uplynutí této doby jsou pak uvolněna i pro širší vědeckou komunitu. Což ale neznamená, že jsou k dispozici úplně všem. Přístup k datům je přes registraci. Jedná se o stejný systém, jako u čínského lunárního programu.
citace 1.8.2021 - 10:42 - MiraH:Ty Vaše mapy jsou stále lepší a je to perfektní práce!
Díky No, já původně ani neměl v plánu nějakou mapku kreslit, protože na internetu se jich najde celá řada. Kvalitních či méně dobrých. Nějak ale ani jedna z nich nebyla podle mých představ, tak jsem si začal kreslit svoji. Nesnažím se na ní odhadovat kdy kde rover byl a kudy pojede, ale polohu se snažím určit podle pořízené fotografie. To jde docela dobře a většinou se lze s polohou strefit s přesností několika metrů. Většinou se orientuji podle větších kamenů, ty jsou na HiRISE vidět. Bohužel u posledních snímků, už chybí čas a tam může být odchylka i několik solů, tak tam většinou ani čas neuvádím.
Velice pěknou mapku dělá Philip Stooke na usf a pěkná je i ta, co jste sem dával Vy od wlr2678, i když u ní mám stále problém, jak je na ní vyznačený sever
Každopádně budu rád, když mi kdokoli dá vědět, pokud narazí na nějakou nepřesnost nebo chybu, abych to opravil a abychom tady měli dobrou mapku pohybu Zhurongu, protože díky chybějícím informacím je jeho pohyb tak trochu detektivka.
Vaše mapy jsou trochu jiné. Jinak pojaté. A to je dělá zajímavé i v porovnání "s konkurencí". Phil Stooke dělá velice dobré mapy, ať už se jedná o jakékoliv vozítka. A zvláště u čínských je to obzvlášť problém kvůli nedostatku oficiálních údajů. Takže zcela určitě Vaše mapy obohacují "informační spektrum". Teď jsem si spojil Vaše jméno s aplikací času na Marsu v jiném vlákně (kterou jsem teda ještě nezkoušel, ale plánuju to) a beru to tak, že počítání času na Marsu rozumíte více než dobře. Takže to, že se s Philipem Stookem rozcházíte o 1 sol, beru tak, že Vaše mapa je správnější. [upraveno 1.8.2021 22:04]
citace 1.8.2021 - 22:00 - MiraH:Takže to, že se s Philipem Stookem rozcházíte o 1 sol, beru tak, že Vaše mapa je správnější.
No, a s tím si právě nejsem vůbec jistý, jestli to mám správně. Philip Stoke počítá soly od 0, tak jak je zvykem u posledních amerických marsovských misí, ale já jsem přešel na číslování od jedničky, jako to měly např. MERy. A jak jsem tu nedávno zmínil, důvod je ten, že podle různých vyjádření CNSA co kdy Zhurong vyfotil, mi připadá, že je CNSA čísluje také od jedničky. Jasněji ale bude, až začnou vycházet vědecké články, kde by to mohlo být uvedené nebo by to mohlo jít odvodit s větší jistotou. Takže časem uvidíme. Ale ono to zase až tak moc nevadí. Jenom se musí jasně uvádět, jak kdo soly počítá, tedy jaké číslo solu použije pro den přistání, jestli 0 nebo 1.
K počítání solů a hlavně k tomu, v který okamžik se sol přičítá o jedničku bych si dovolil ještě takovou malou upřesňující poznámku. Hodiny misí na Marsu se neřídí podle LMST, což je místní střední sluneční čas v místě přistání sondy, ale podle Mission Time MT. To je marsovský čas, podle kterého se řídí řídící středisko, a podle kterého se plánují i aktivity sondy na Marsu. Sol se pak přičítá o jedničku o půlnoci MT. MT je oproti LMST trochu posunutý. To posunutí vzniká několika způsoby. Například u Curiosity, Perseverance a InSight je MT definovaný jako LMST v plánovaném místě přistání. U Perseverance a i Curiosity je pak rozdíl mezi LMST a MT asi jenom šest vteřin. Větší rozdíl byl u MERů. Tam se pro výpočet MT sice také vzaly plánované souřadnice, ale byla i snaha, aby MT co nejvíce odpovídal pravému slunečnímu času, tedy když Slunce bude kulminovat, aby hodiny MT ukazovaly pokud možno poledne. MT se tedy ještě synchronizoval s místním pravým slunečním časem tak, aby se hodiny MT shodovaly s pravou půlnocí v plánované polovině mise, aby tedy ukazovaly půlnoc o pravé půlnoci 45. sol. Rozdíl mezi LMST a MT byl pak přes 30 minut. Podobně to měly i Vikingy, kdy se MT synchronizoval s pravou půlnocí sol před přistáním.
Jaký má MT Zhurong, nevíme (tedy abych byl přesnější, já to nevím), a tak pokud někde uvádím marsovský čas, jedná se o LMST vztažený k místu přistání a při počítání solů vycházím také z LMST, takže přičítám jedničku v 00:00 LMST.
Rover Zhurong je na povrchu Marsu 82. sol a dosud urazil celkovou vzdálenost 808 m. Je to o 100 m více od poslední polohy.
Máme dispozici pouze jeden snímek ze zadní HazCam, která je příliš nízko u povrchu a nemá moc dobré rozlišení. Z HazCam nejsou dobře vidět detaily na horizontu jako z kamery NavCam a nejde tak určit přesnou polohu roveru. Z ujeté vzdálenosti by ale mohl být někde v okolí duny, která je 82 m jižně od poslední pozice (viz. předchozí mapka).
Orbiter TW-1 zatím sloužil hlavně pro přenos dat z roveru. 14. srpna bude rover na povrchu 90. sol, tedy dobu, pro kterou byla jeho mise navržena a orbiter přejde na jinou oběžnou dráhu, ze které bude plnit své vlastní vědecké úkoly. Bude provádět detailní snímkování povrchu kamerami s vysokým rozlišením ~1 m, se středním rozlišením ~100 m, pomocí podpovrchového radaru a další vědecké experimenty, kterých je na orbiteru celkem sedm.







 Ovšem pokud budou mít Číňani stejný přístup jako u sondy Chang'e 4 [Čchang-e 4], tak výsledky měření zveřejní až za rok.
Ovšem pokud budou mít Číňani stejný přístup jako u sondy Chang'e 4 [Čchang-e 4], tak výsledky měření zveřejní až za rok. 