|
V tomto článku je vysvětlení potíží, o kterých jsem se nedávno zmínil, a které vyřadily Curiosity z provozu na 7 solů (3496-3502), kdy nepořizovala žádné snímky a zřejmě neprováděla ani žádná další vědecká měření. 7. června (sol 3496) se Curiosity přepnula do nouzového režimu, protože jedno z teplotních čidel uvnitř roveru zaznamenalo přehřívání elektroniky. Po dvou solech se pak Curiosity vrátila do normálního režimu, ale inženýři dosud analyzují příčinu problému. Nejpravděpodobnější příčinou je chybně naměřená teplota.
O tři soly dříve proběhla pravidelná kontrola kol, která se prováděla po ujetí vzdálenosti 1000 m. Při této prohlídce se zjistilo, že nejpoškozenější levé přední kolo má prasklý další grouser - segment vzorku pláště (ten klikatý vzorek). Kolo jich má již poškozených 5 z 19 a i vypadla další část pláště. Bylo tedy rozhodnuto, že interval kontroly kol se zkrátí a proběhne každých 500 m.
[upraveno 23.6.2022 18:55] |
|
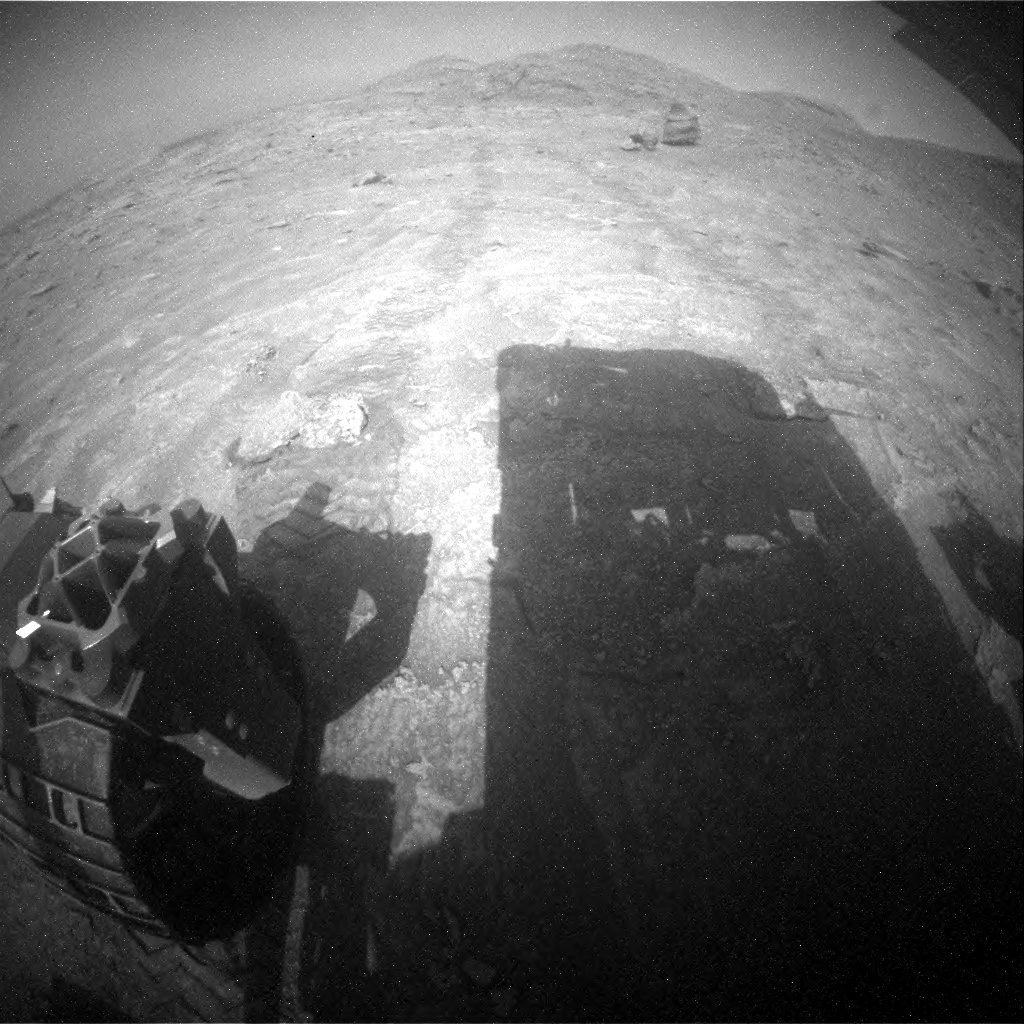
Pohled na vrstevnatou horninu, o které se předpokládá, že se vytvořila ve vodním prostředí, na dně potoka nebo jezírka. Tento obrázek je vytvořený z mozaiky šesti snímků kamery MastCam, které Curiosity pořídila 2.6.2022 / sol 3492.

[upraveno 24.6.2022 21:29] |
|
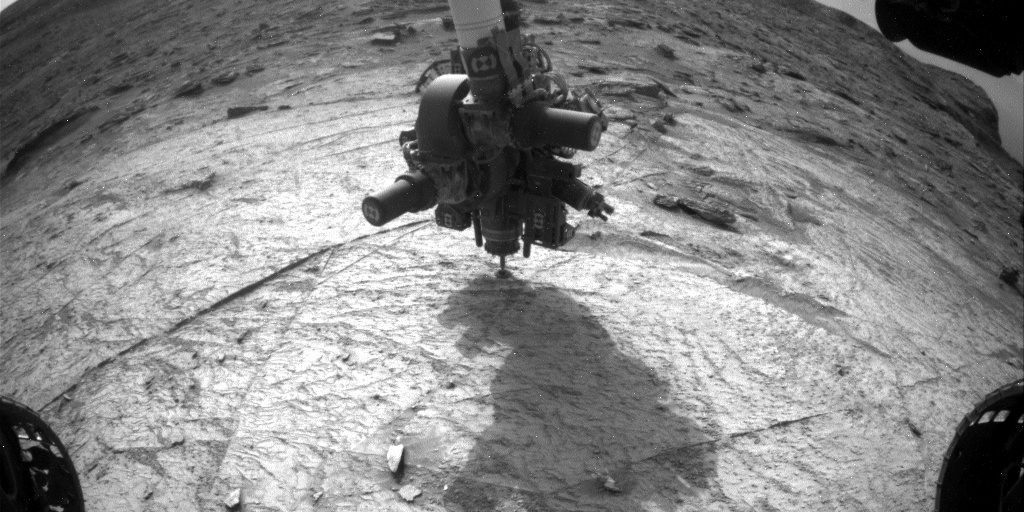
Po zastávce trvající 21 solů se Curiosity opět dala do pohybu a přesunula se 27 m jižním směrem. Během dlouhé zastávky provedla svojí vrtací soupravou další vrt, který dostal jméno Avanavera. Materiál ze vzorku analyzovala Curiosity přístrojem CheMin a ve své palubní laboratoři SAM. Pomocí přístrojů ChemCam LIBS a APXS provedla analýzu materiálu stěny vrtu. Jedná se o první vrt od loňského listopadu a v celkovém pořadí již 35. vrt, který Curiosity provedla.

Snímek pořízený přední pravou kamerou HazCam-B 23.06.2022 19:00:25 UTC / 3512 15:33:50 LMST

MastCam-L: 23.06.2022 19:07:57 UTC / 3512 15:41:10 LMST
[upraveno 13.7.2022 14:36] |
|
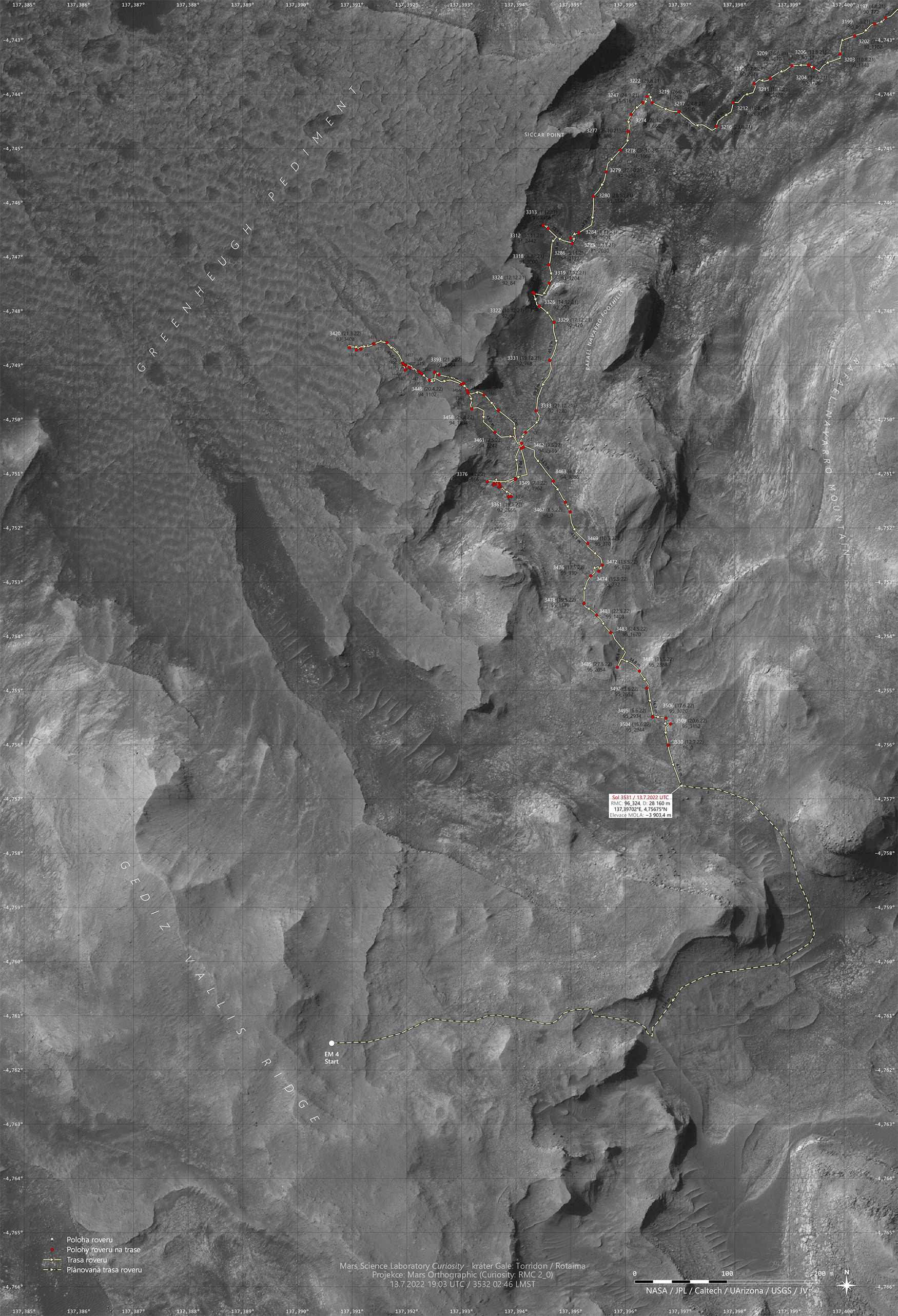
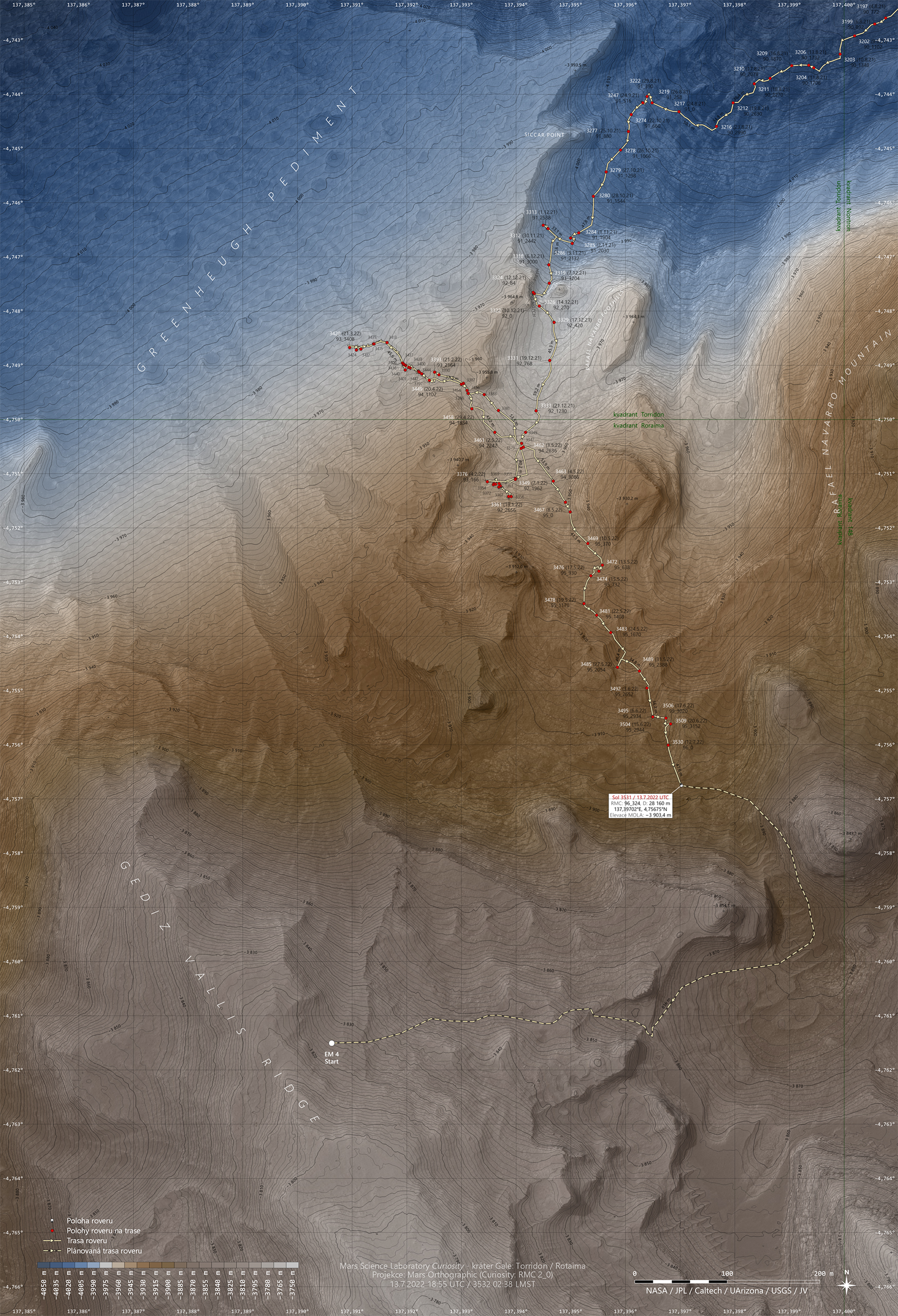
I dnešní 3531. sol Curiosity vyrazila na cestu. Opět se vydala zhruba jižním směrem a ujela vzdálenost necelých 48 m.
   |
|
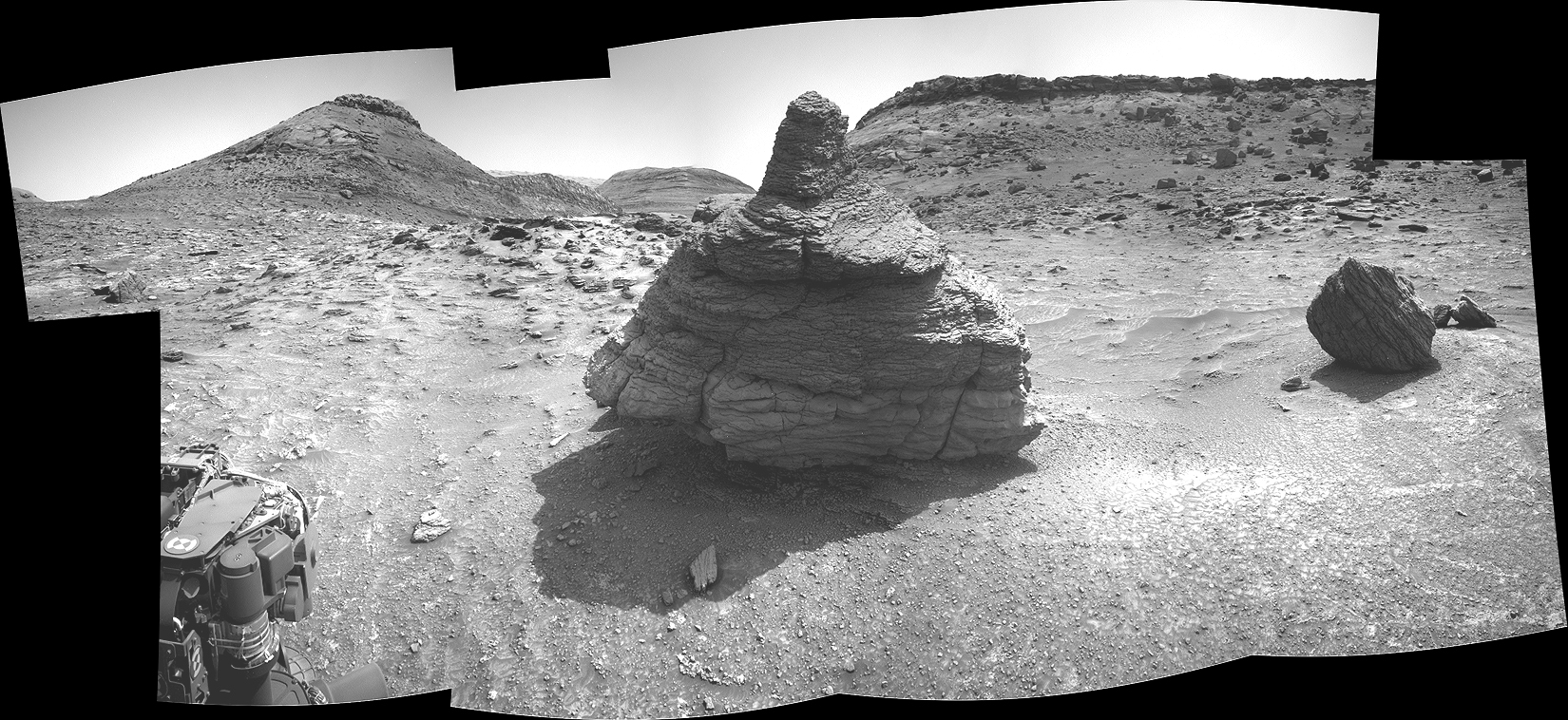
Dnešní sol Curiosity opět popojela několik metrů a zastavila se před zajímavým vrstveným balvanem. Celá skupinka balvanů, která je dobře vidět i na mapkách, dostala jméno Ilha Novo Destino.

Mozaika z osmi snímků NavCam-R-B 15.7.2022 06:12-06:33 UTC / 3533 12:58-13:19 LMST |
|
Pěkná barevná mozaika ze snímků kamery MastCam, kterou vytvořil Thomas Appéré. Je na ní vidět i balvan, před kterým nyní Curiosity stojí. Snímky byly pořízené z místa, na kterém Curiosity stála 21 solů (RMC: 95_3152), a na které dorazila 3509. sol.
 |
|
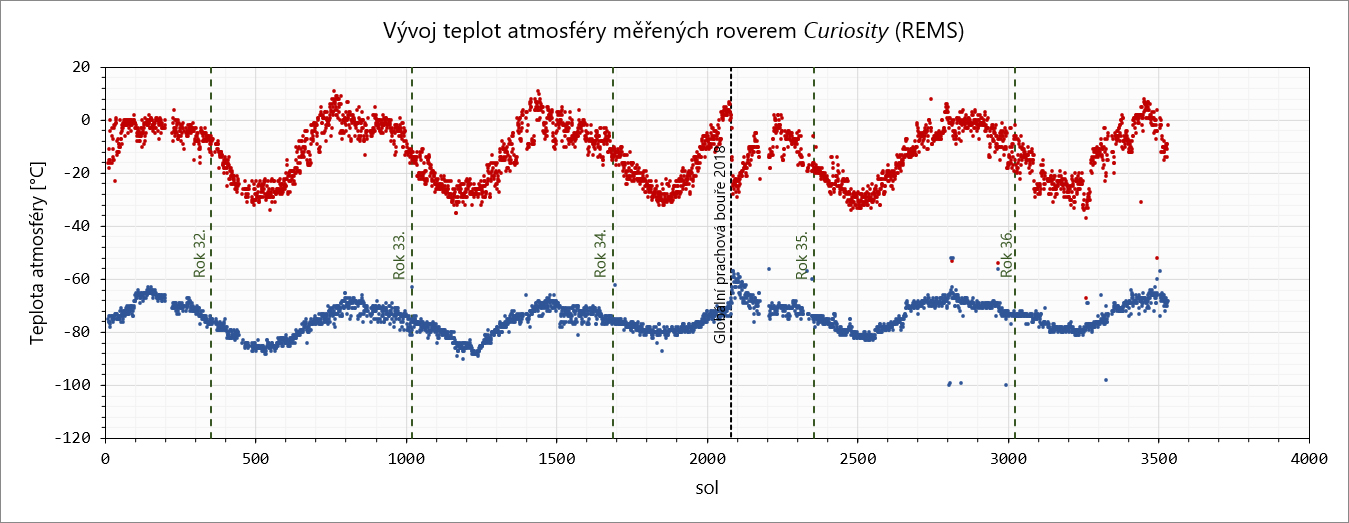
Teploty v současné době klesají i v kráteru Gale, kde je zaznamenává rover Curiosity přístrojem REMS. Za posledních 7 solů se průměr teplot pohybuje v rozmezí −9,1°C až −68,7°C. Na grafu jsou také zobrazené okamžiky jarní rovnodennosti (Ls=0°) s uvedením čísla počínajícího marsovského roku.
 |
|
| Jenom malá oprava, protože jsem tu uvedl nesprávnou informaci. Ilha Novo Destino se jmenuje přímo ten veliký balvan. |
|
Po krátké víkendové zastávce u balvanu Ilha Novo Destino se dnes Curiosity vydala jihozápadním směrem u ujela vzdálenost 30 m.

Pohled zadní kamerou HazCam-L-B 18.7.2022 09:06:57 UTC / 3536 13:53:00 LMST |
|
Mozaika ze snímků navigační kamery z místa, kam dnešní sol Curiosity dojela.

NavCam-L-B 18.07.2022 ~9:10 UTC / 3536 ~13:55 LMST
|
|
Curiosity sice pomalu, ale vytrvale stoupá po úpatí hory Aeolis Mons. Od místa přistání, již překonala převýšení 600 m (při jízdě v 3 536. solu) a ujela vzdálenost přes 28 km. Za posledních pět jízd urazila vzdálenost 113 m a vystoupala 14 m. S menšími odchylkami se stále drží plánované trasy, která vede k hřebeni Gediz Vallis Ridge.

Pohled severozápadním směrem po včerejší (sol 3540) jízdě dlouhé 15,4 m. |
|
| Jak je zajišťována přesná poloha roveru na Marsu? GPS tam asi není. [upraveno 23.7.2022 21:17] |
|
citace 23.7.2022 - 21:05 - Grofino:
Jak je zajišťována přesná poloha roveru na Marsu? GPS tam asi není. [upraveno 23.7.2022 21:17]
K určení polohy se jednak využívají mapy, které jsou vytvořené ze snímků HiRISE s rozlišením 25 cm / pixel. Ze stereo párů těchto snímků se pak vytvoří 3D mapa. Ta má horizontální rozlišení 1 m / pixel a vertikální kolem 10 cm. Rover po každé jízdě pořídí navigačními kamerami stereo obrázky okolí. Z nich se pak vytvoří 3D model terénu, který rover kolem sebe vidí. Z něho se pak dají určit například vzdálenosti a velikosti objektů. Porovnáním map z HiRISE a pohledu z navigačních kamer se nakonec určí poloha roveru. To je princip, ve skutečnosti je to trochu složitější.
Mapy ze snímků HIRISE jsou pro plánování trasy roveru nedostatečné co do přesnosti a rozlišení, proto se ještě zpřesňují modelem terénu z navigačních kamer roveru. Místa, kde se definuje nová vztažná souřadná soustava a kde se vytvoří taková mapa, se označují jako Site. A s touto mapou a souřadnou soustavou XYZ v metrech s počátkem v místě, kde rover provedl snímkování, probíhá plánování trasy roveru a určování jeho polohy. Pokud už přesnost takové mapy je pro plánování pohybu roveru nedostatečná, protože její přesnost i rozlišení klesá se vzdáleností, nebo navigační kamery neviděly tam, kam se rover chystá jet, zadefinuje se nová Site, tzn. nová vztažná soustava a vytvoří se nová podrobná mapa zase pomocí mapy HiRISE a snímků z navigačních kamer. A takhle je to stále dokola. V téhle chvíli má Curiosity Site=96, čili v pořadí 96. souřadný systém a asi i 96. mapu.
Ta základní mapa z HiRISE se vytváří již při plánování mise dlouho před přistáním. Je složena z mnoha snímků a zahrnuje celou přistávací oblast, a i místa kam chtějí s roverem jet. Obvykle je ve válcové projekci se standardní rovnoběžkou v plánovaném místě přistání.
|
|
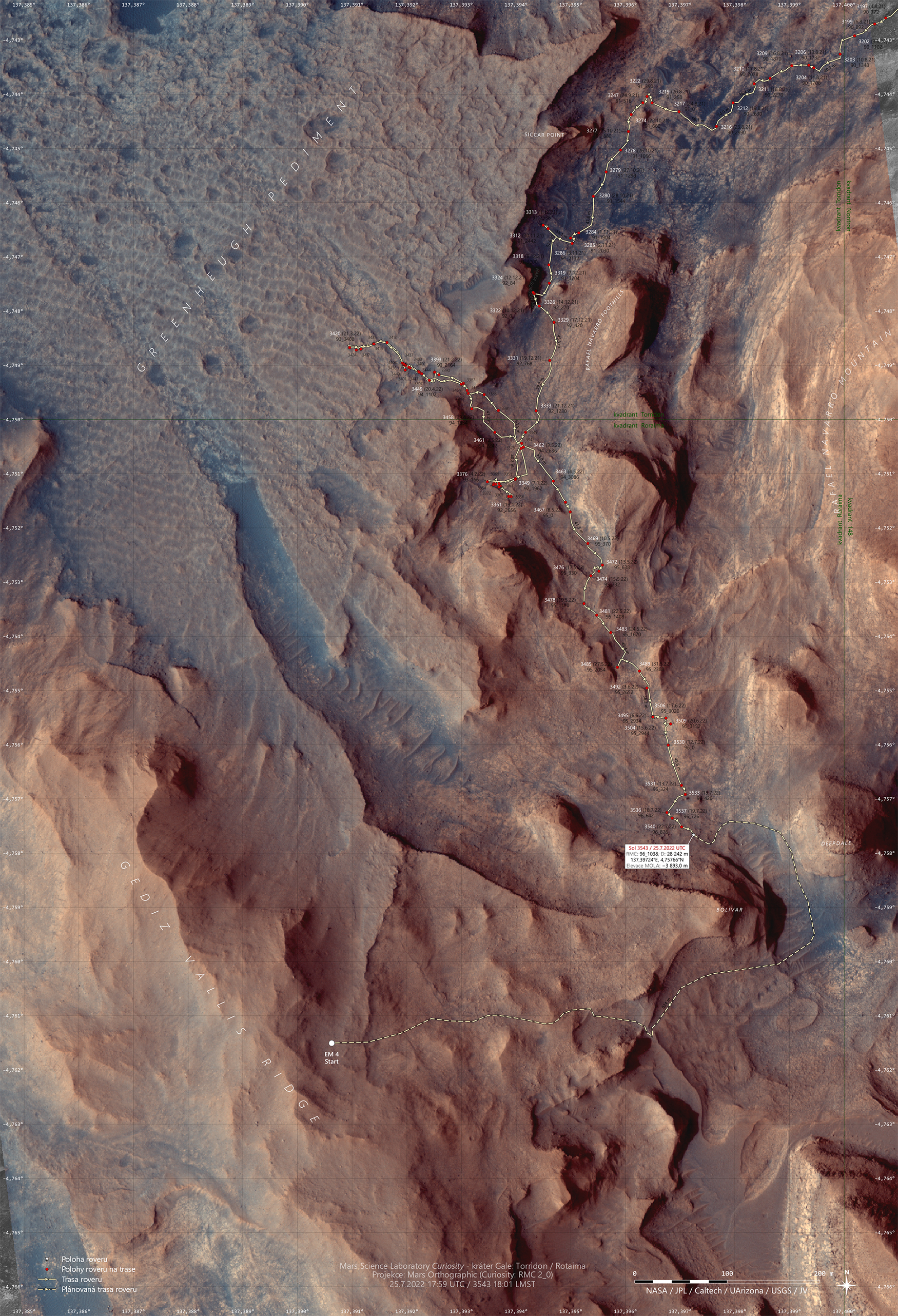
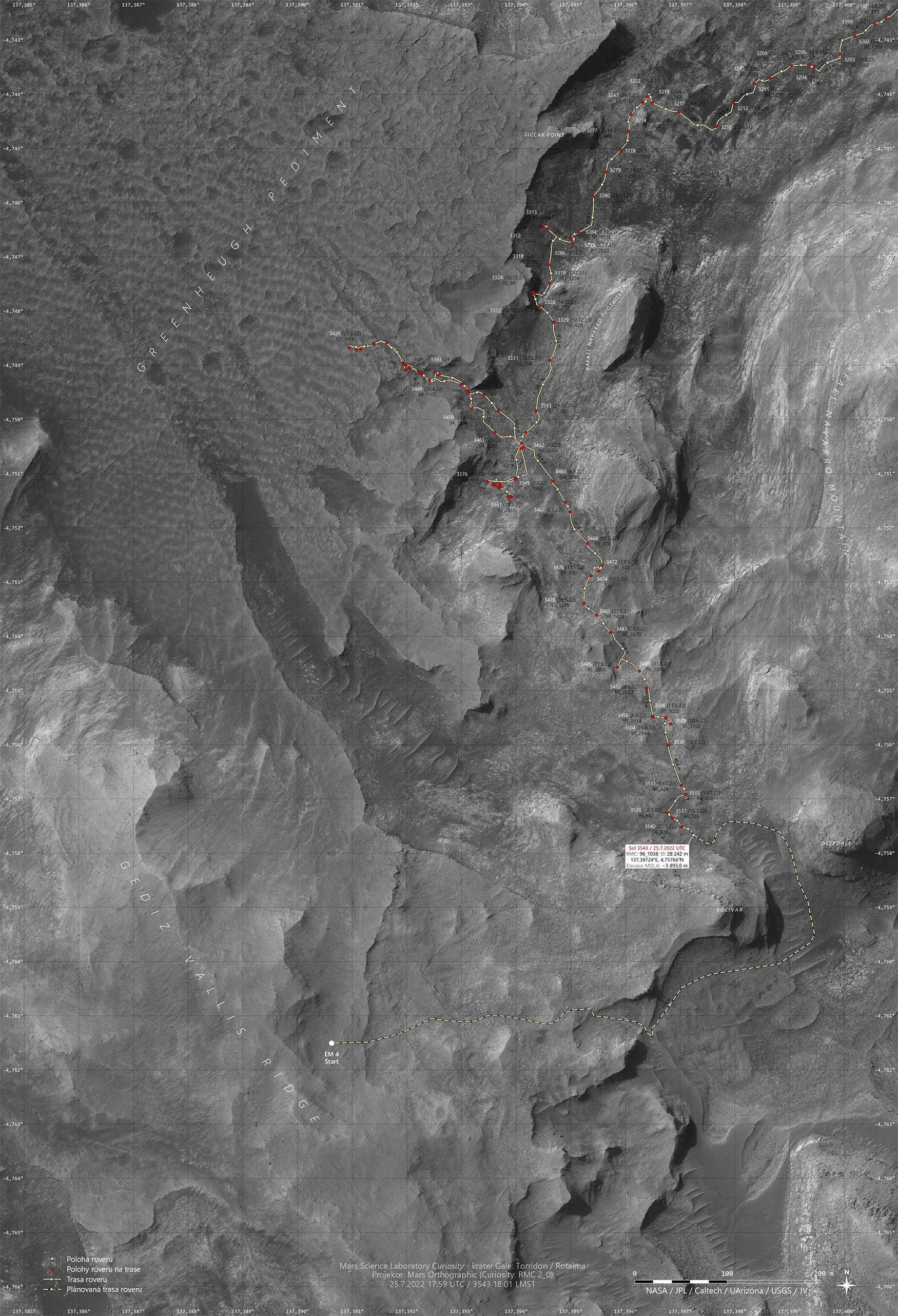
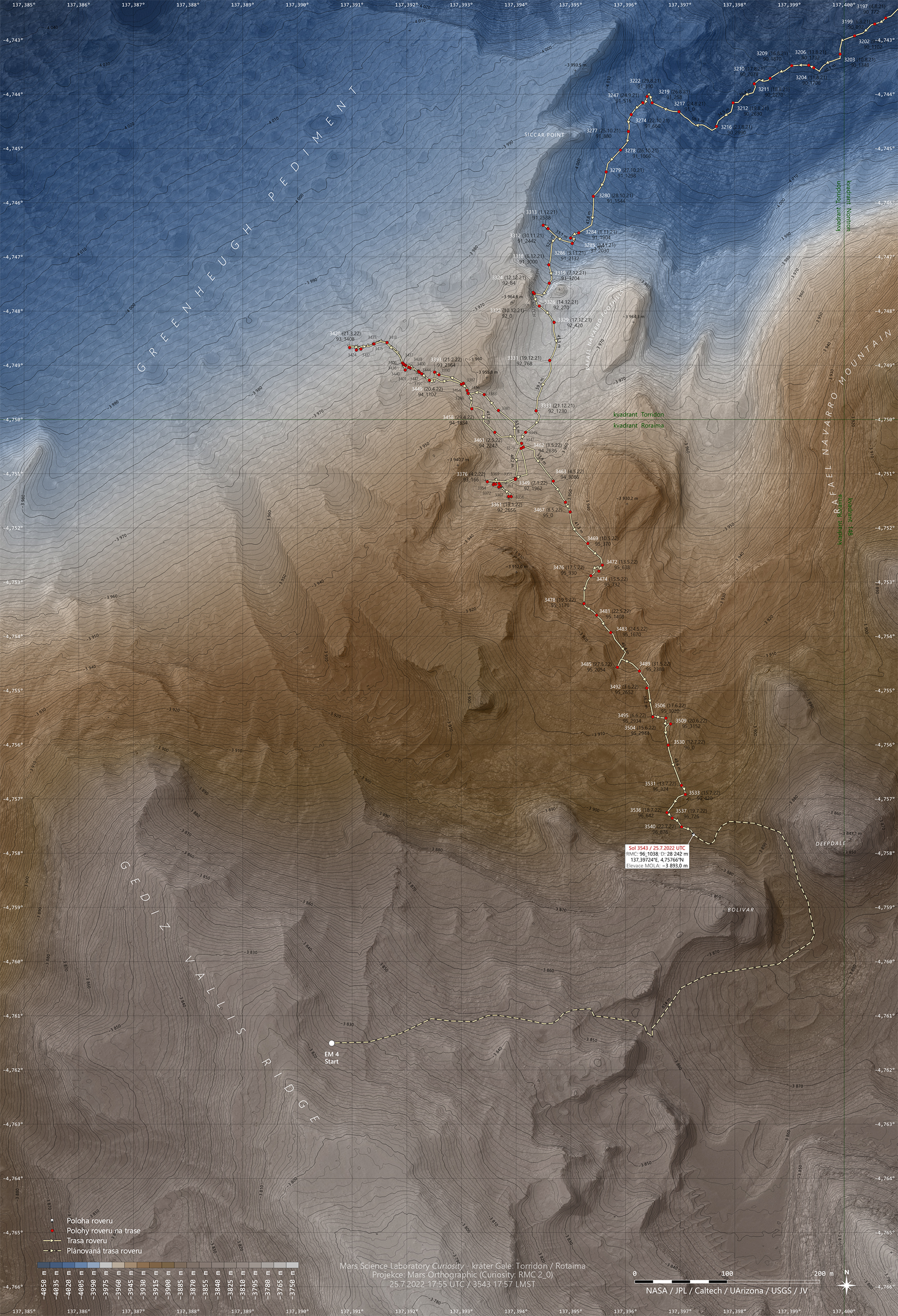
Curiosity dnes podnikla kratší jízdu necelých 17 m. Časem by měla projet soutěskou mezi kopci Deepdale a Bolivar. Po objetí kopce Bolivar se pak vydá směrem na západ k hřebeni Gediz Vallis Ridge. S ohledem na kola a na složitost terénu postupuje kupředu velice pomalu a opatrně. Do soutěsky navigačními kamerami zatím není dobře vidět, tak doufejme, že tam na nás nebude čekat nepříjemné překvapení, jako se tomu stalo při pokusu o traverz přes Greenheugh Pediment.

Mozaika NavCam-L-B 25.7.2022 ~14:14 UTC / 3543 ~14:22 LMST
a ještě mapky s aktuální polohou roveru
   |
|
Poslední dva soly byla Curiosity opět na cestě. Včera se vypravila severním směrem 28,3 m a dnes popojela 17,7 m na východ.

NavCam-L-B 27.7.2022 ~14:50 UTC / 3545 ~13:40 LMST |
|
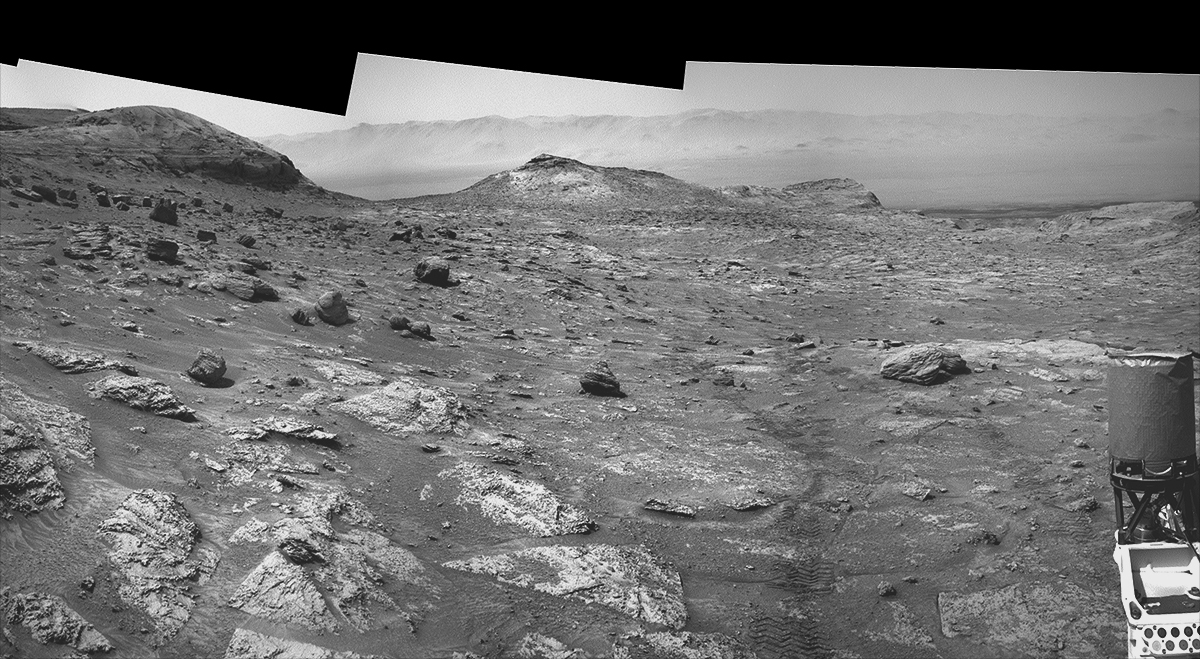
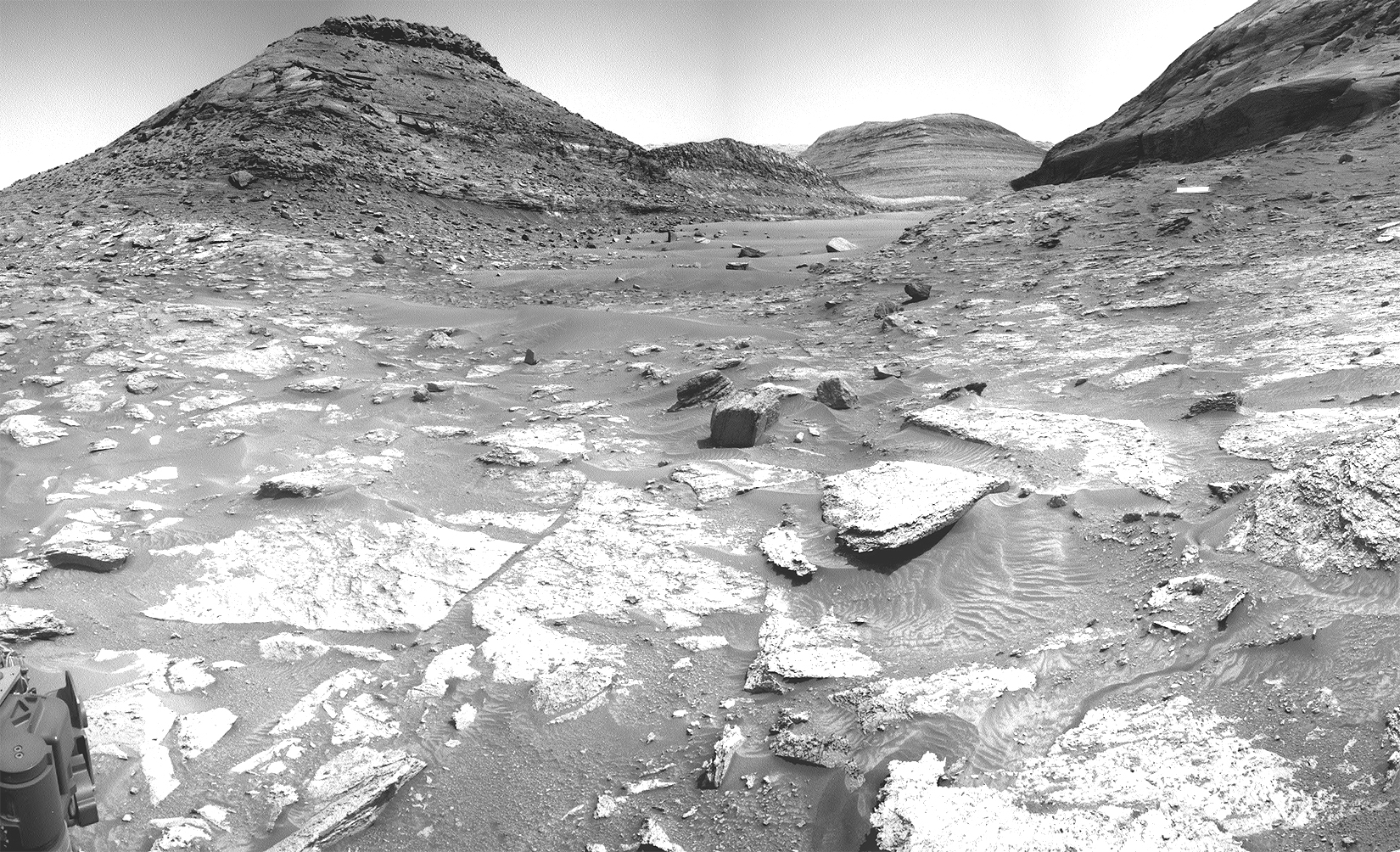
Pohled kamerou MastCam-L do soutěsky mezi kopci Deepdale a Bolivar, do které Cuiosity míří, a kterou by podle plánu měla i projet.

Mozaika MastCam-L (34 mm) 27.7.2022 14:37:14 UTC / 3545 13:27:41 LMST |
|
Co by som dal za take fotky, ked som bol maly chlapec... a za taky rover...
Kolko veci musi do seba 100% zapadnut, aby nam tu Honza Vacek mohol robit takuto prehliadku Marsu... |
|
| A hlavně jaký je Mars najednou zajímavý, žádná nudná rovina s pár kopečky někde daleko, jak to bylo u prvních misí, kde se muselo bezpečně přistát. |
|
| Ty prachové duny na obrázku vypadají docela těžko průjezdné. No, uvidíme. Jsem opravdu zvědav, kudy přesně pojedou a co v takovémto terénu rover zvládne. |
|
| Tak na to jsem Aleši také zvědavý. Můj odhad je, že se pokusí projet po levém okraji těch dun, kde je sice pevný povrch, ale je to tam hodně kamenité. Rozhodně plánovačům jízdy nezávidím, protože ten terén tady vypadá pro Curiosity hodně obtížný. A zrovna v tomhle případě při plánování jízdy musejí brát v úvahu ještě jeden problém. Ty dva kopce jsou poměrně vysoké a jsou blízko sebe. A nesmí se stát, aby zabránily komunikaci se Zemí nebo s orbitery, až budou nad oblastí přelétat. Je o tom zmínka ve včerejším blogu. Přičemž ta schopnost komunikace musí být zachována po celé trase jízdy, protože zrovna u Curiosity se docela často stává, že se z nějakého důvodu, většinou kvůli obtížnosti terénu, nečekaně zastaví, a pak čeká na instrukce ze Země. |
|
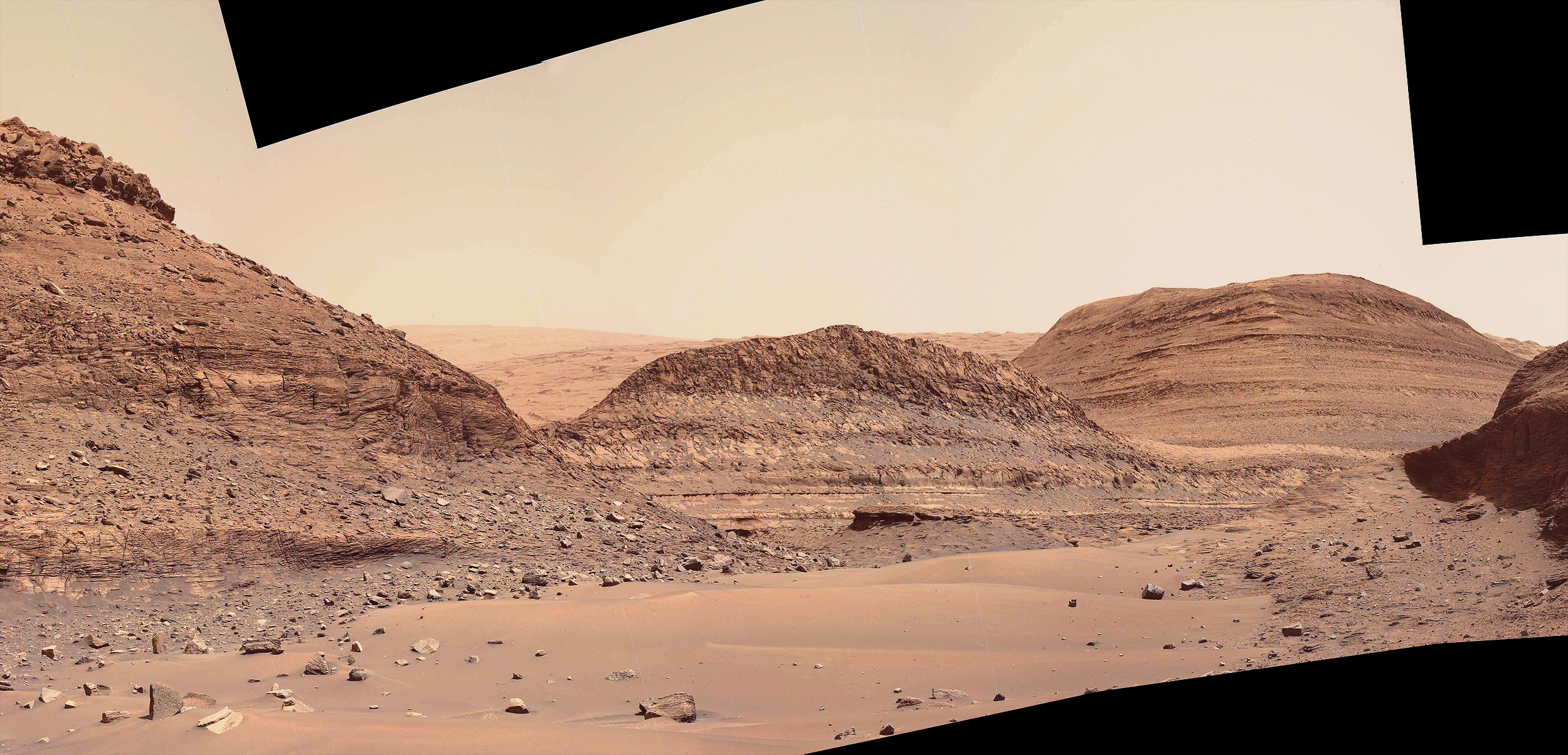
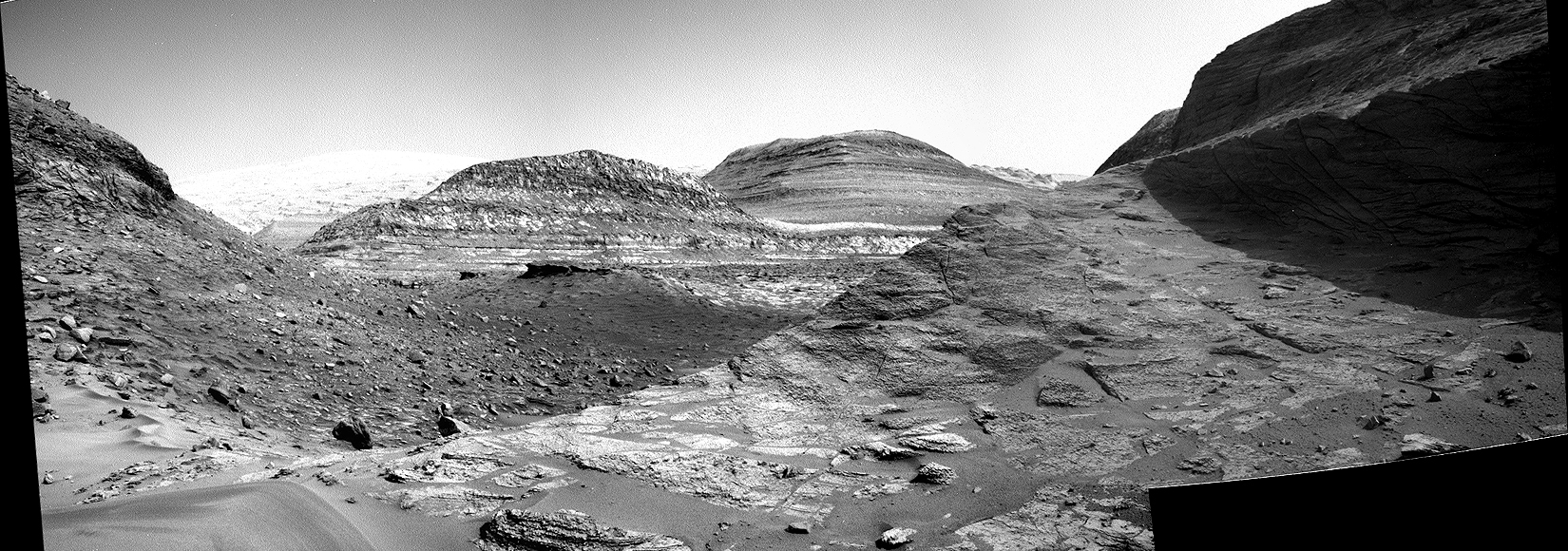
Nový pohled levou kamerou MastCam do soutěsky Paraitepuy Pass, do které Curiosity pomalu vjíždí.

Mozaika z kamery MastCam-L z 31.7.2022 ~17:20 UTC / 3549 ~13:30 LMST |
|
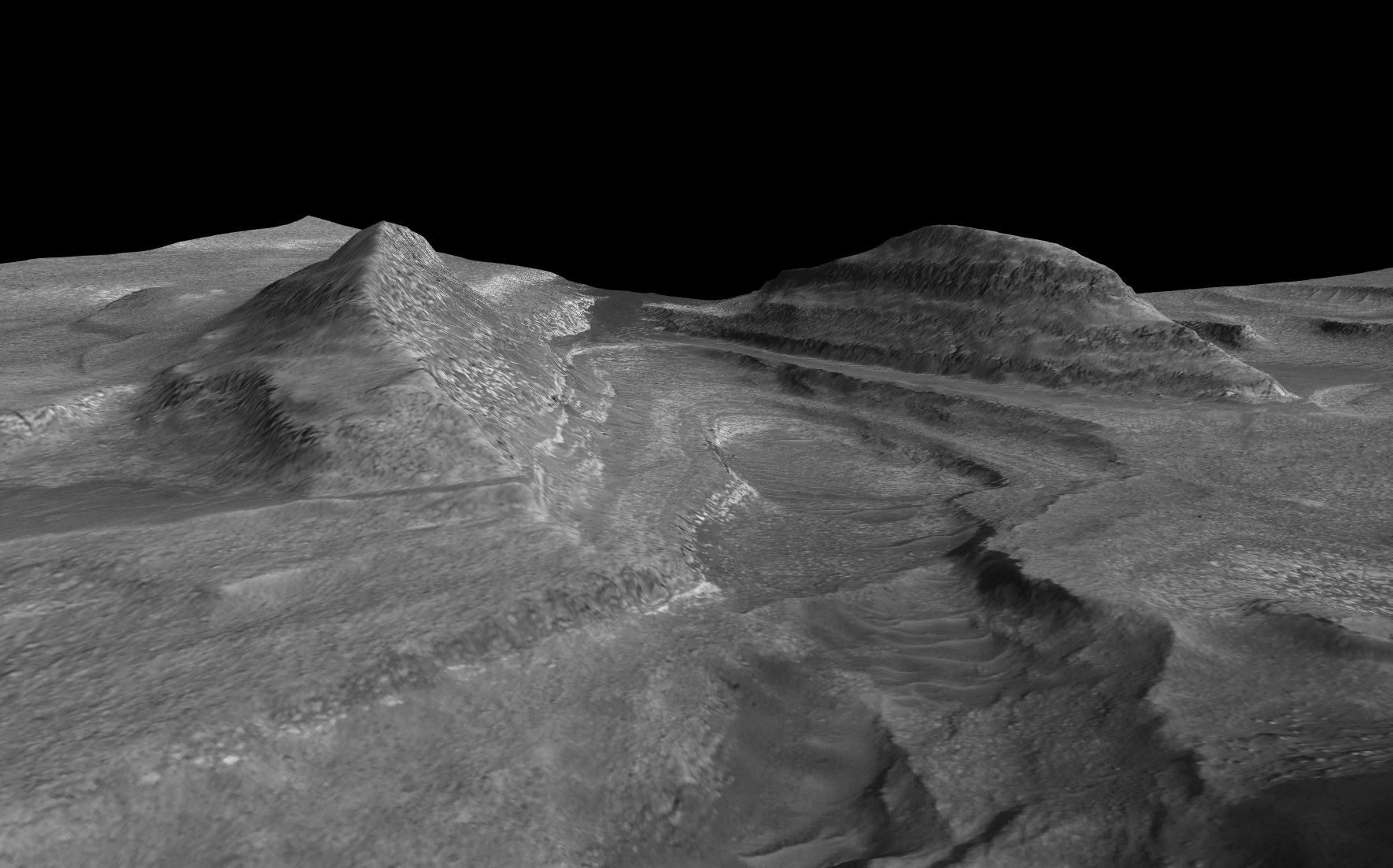
Na předešlém snímku je uprostřed takový zajímavý kopec se složitou vrstevnatou strukturou, který vypadá jinak než kopce v okolí. Ona je to ale jenom část původního kopce, jeho západní část úplně chybí. Je to vlastně řez tím kopcem a my se tak díváme na jeho vnitřek, alespoň tak mi to připadá laickým pohledem.

HiRISE DTM 3D model |
|
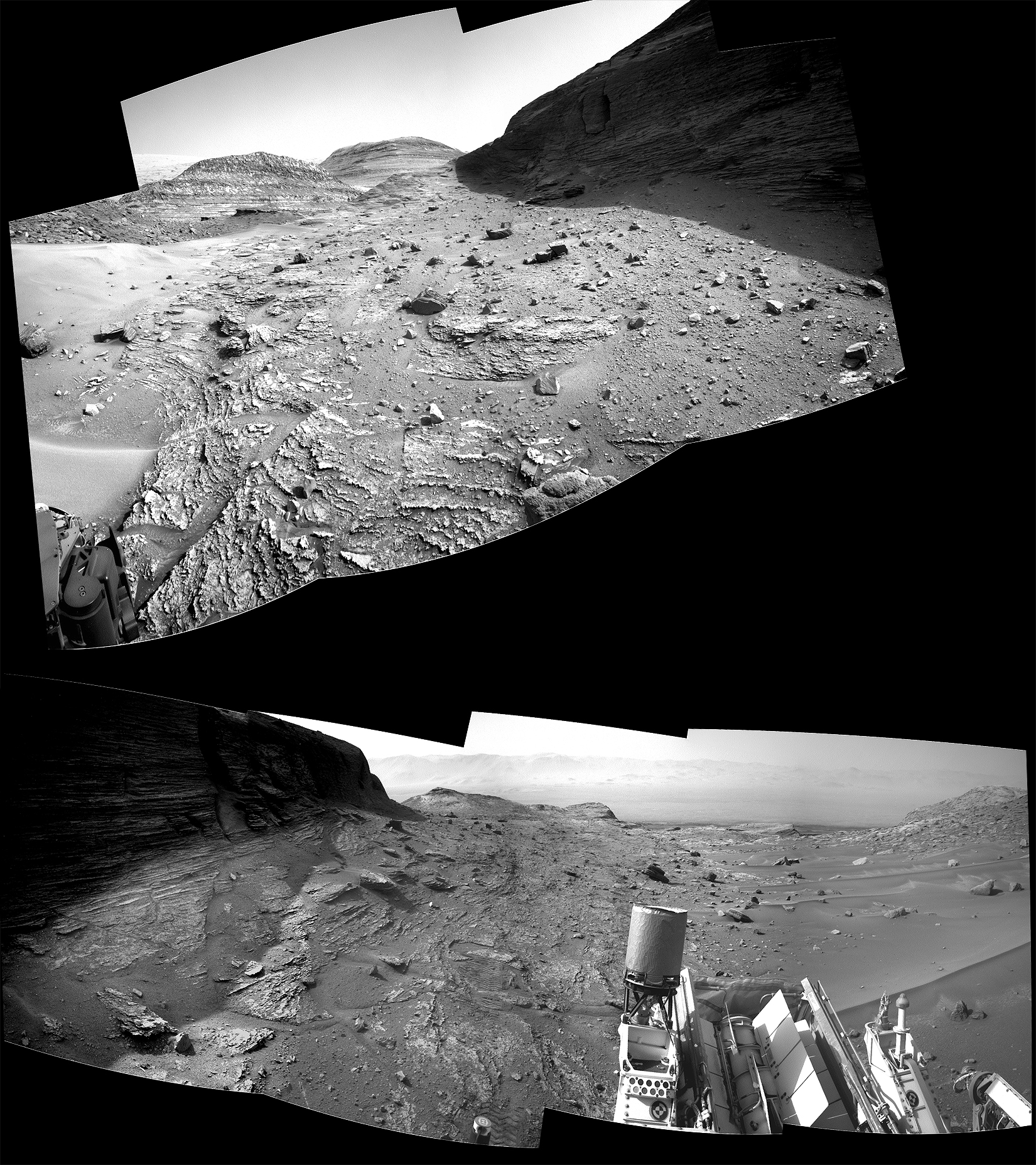
Snímky z levé navigační kamery, které prořídila Curiosity včera / sol 3553 při průjezdu soutěskou Paraitepuy Pass. Postupuje po pevném povrchu blízko severovýchodní stěny kopce Bolivar podél dunového pole a jak to z obrázků vypadá, má již větší část cesty úspěšně za sebou.
 |
|
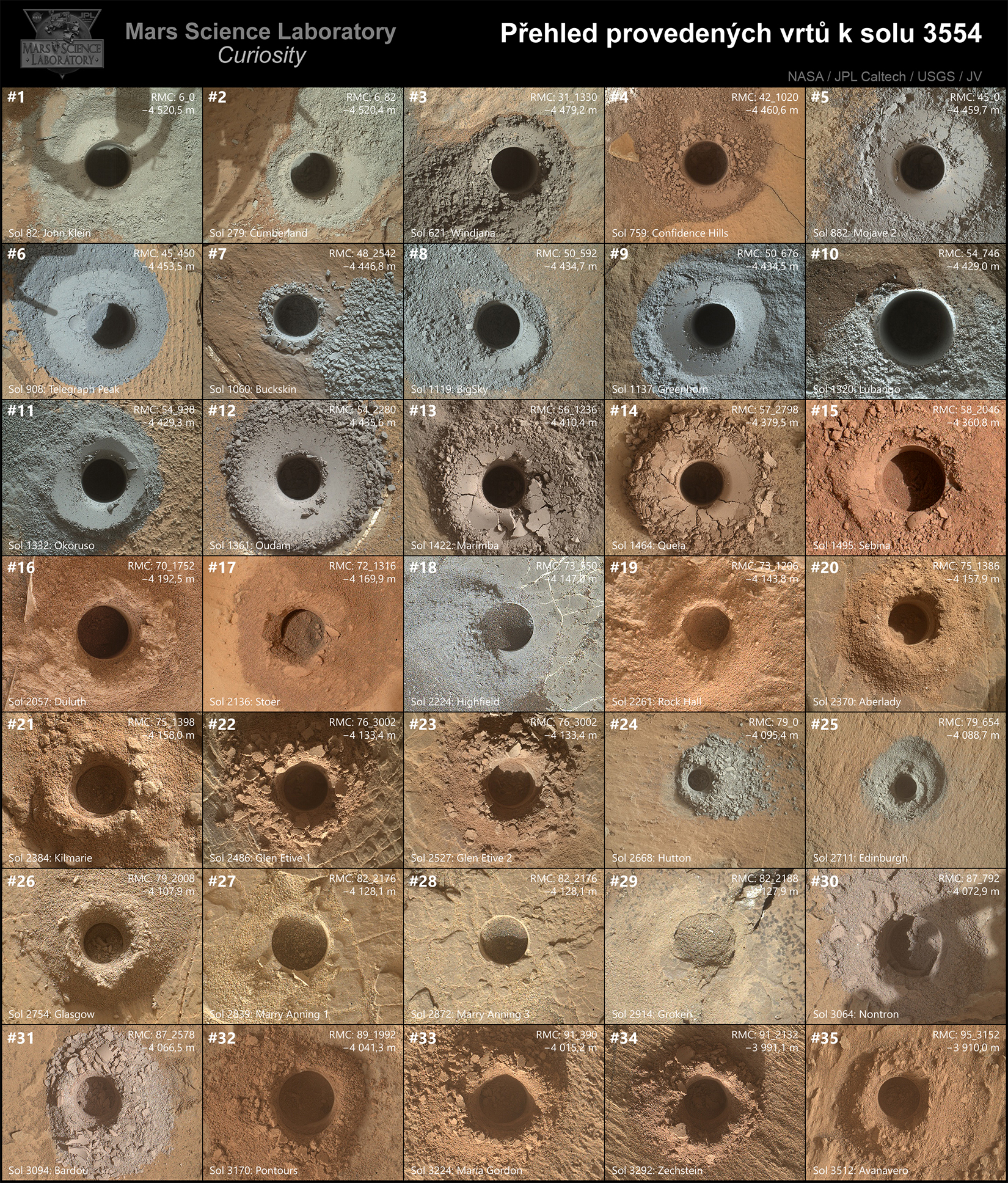
Dnešní 3554. sol oslavuje Curiosity velké kulaté výročí. Zítra 6.8.2022 v 5:17:57 UTC / 3554 21:58:05 LMST tomu bude přesně deset pozemských roků (5,316 marsovského tropického roku) od chvíle, kdy Curiosity přistála na povrchu Marsu v severní části kráteru Gale. Hlavním cílem roveru bylo zjistit, jestli někdy v minulosti existovaly na Marsu podmínky, které by umožnily vznik života.
Při svém desetiletém putování kráterem Gale urazila Curiosity vzdálenost 28,70 km (podle dat GIS) a od místa přistání vystoupala do výšky 611 m po úpatí hory Aeolis Mons. Během této cesty provedla Curiosity na 33 místech 35 vrtů a na 3 místech odebrala lopatkou 6 sypkých vzorků, které byly analyzované v palubních laboratořích SAM nebo CheMin, pořídila přes 500 tisíc snímků z vědeckých a inženýrských kamer a na Zemi odeslala přes 3TB dat.
 
Během svého desetiletého pobytu na Marsu Curisosity zjistila, že kráter Gale byl v minulosti po dlouhá období formovaný tekoucí i stojatou vodou a panovalo v něm tedy klima, které umožňovalo existenci vody v kapalném stavu. Nalezla jílovité materiály, které vznikaly ve vodním prostředí s nízkým obsahem soli (Yellowknife Bay), v některých vzorcích objevila ložiska koncentrací kysličníků manganu (Kimberley), ty ke svému vzniku potřebují vlhké prostředí bohaté na kyslík, a přímo i detekovala organické molekuly jako jsou amoniak, kyselina benzoová a fenol (Ogunquit Beach). Byly také nalezené i sloučeniny s obsahem fosforu a dusíku. Nalezla tedy celou řadu stavebních kamenů a podmínek, které jsou pro vznik života zapotřebí.
Deset let je dlouhá doba a ta se i nějak projevila na stavu roveru. Jednak jsou to kola, o kterých všichni víme, v jakém jsou stavu. Poškozování kol znemožnilo Curiosity používat AutoNav režim, který se nedokáže vyhnout menším ostrým kamenům, a které jsou pro kola nebezpečné. Další problém, který postihl Curiosity je vrtačka, u které přestal fungovat posuv vrtáku. Vyřešilo se to tak, že posuv vrtáku je nahrazený pohybem ramene. Funguje to docela dobře, a Curiosity je schopná stále odebírat odvrtané vzorky, ale je to další zátěž pro rameno. Poměrně často se v poslední době také stává, že se rameno zablokuje a rover pak má několikadenní přestávku, než se problém vyřeší. Rover má dva hlavní počítače, které jsou označené jako A a B. Počítač A má poškozenou část paměti a není ho možné používat pro vědecké operace. Věcí, které již na Curiosity nefungují, jak mají, je však více, ale tyto zmíněné mohou výrazně ovlivnit další průběh mise, případně způsobit trvalé zastavení roveru.
Curiosity nyní vstupuje do druhé dekády svého pobytu na Marsu, tak jí popřejme hodně zdraví, protože ho bude hodně potřebovat, aby nám ještě nějakou dobu mohla posílat úžasné obrázky a posílat vědecká data, která nás mohou ještě překvapit. |
|
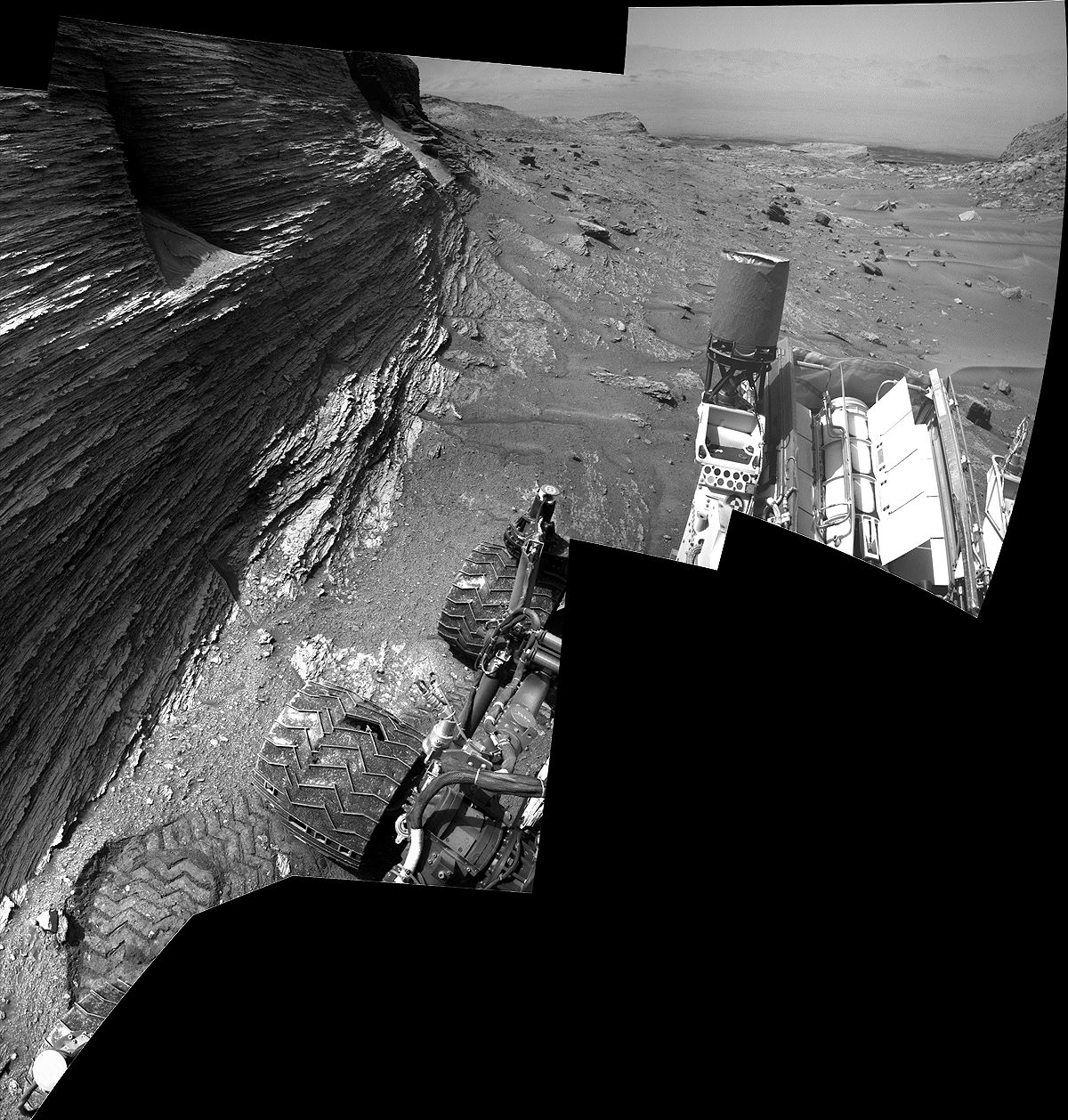
Obrázek z průjezdu Curiosity soutěskou Paraitepuy Pass ze včerejška (podle SELČ z dneška). Aby se vyhnula kamenům, jede podél stěny kopce Bolivar nejblíže, jak jen může. Ke skalnímu prahu, odkud se jí naskytne pohled do údolí Gediz Vallis jí zbývá asi 15 m. Pak teprve uvidí, jak obtížná cesta ji bude čekat „na druhé straně“.

NavCam-L-B 7.8.2022 ~22:31 UTC / 3556 ~14:05 LMST |
|
| Podle těch stop v písku byl hodně blízko skály. |
|
citace 8.8.2022 - 21:21 - Ervé:
Podle těch stop v písku byl hodně blízko skály.
.... a není to (snímek: NavCam-L-B 7.8.2022 ~22:31 UTC / 3556 ~14:05 LMST) náhodou pohled dozadu podél pravého boku (na snímku je RTG generátor, který je vzadu)?
Pak by to znamenalo, že Curiosity do té skály v podstatě narazila. A ta stopa kola odpovídá přednímu kolu, které se pak natočilo a rover popojel kousek doleva a stranou.
(Spekulace: struktura té skály z mnoha jemných paralelních "listů/vrstev" odpovídá tomu, z čeho mají couvací radary a a SW pro vyhodnocování obrazu obvykle největší potíže)
|
|
citace 9.8.2022 - 02:19 - kacenka:
Pak by to znamenalo, že Curiosity do té skály v podstatě narazila. A ta stopa kola odpovídá přednímu kolu, které se pak natočilo a rover popojel kousek doleva a stranou.
(Spekulace: struktura té skály z mnoha jemných paralelních "listů/vrstev" odpovídá tomu, z čeho mají couvací radary a a SW pro vyhodnocování obrazu obvykle největší potíže)
Myslím, že se Curiosity té skály ani nedotkla. Ty tenké vrstvičky skály jsou vrstvičky sedimentů, tedy nejsou z žádného extra pevného a tvrdého materiálu. Curiosity má tunu, a jede hodně pomalu. Na rovině na pevném povrchu je to maximálně 4,2 cm/s. Kdyby kolem na skálu najela, tak než by zaznamenala nějaký odpor a zastavila se, spousta těch vyčnívajících vrstviček by to odnesla. Ty jsou ale neporušené.

Kromě toho, Curiosity si nevybírá cestu sama, protože režim AutoNav již nepoužívá. Jede podle trasy, kterou vybírají plánovači jízd podle map vytvořených z navigačních kamer. Na ty malé vzdálenosti v řádu metrů, které v těchto místech během solu Curiosity ujede, mají mapy přesnost pod centimetr. Radar Curiosity nemá, orientuje se podle 3D obrazu z HazCam, ze kterého vyhodnocuje případné překážky, které plánovači přehlédli, podle odometrie odvozené z otáčení kol, vizuální odometrie z navigačních kamer a ještě má k dispozici údaje z inerciální jednotky IMU. Všechna tato data zajistí, že Curiosity dojede po vytyčené trase přesně na místo, kam dojet má a tam i zaparkuje ve správné poloze. Aby tedy do té stěny narazila, muselo by toho selhat víc než jenom vyhodnocení obrazu z HazCam, alespoň podle mého laického názoru.
A několik obrázků z dnešního solu 3558. Curiosity popojela několik metrů a je již u skalního prahu na konci Paraitepuy Pass a je již vidět i svah, kudy se Curiosity nejspíš vydá. Příští jízdu by snad už měla prahu dosáhnout a my bychom měli vidět přímo do údolí Gediz Vallis.

NavCam-L-B 10.8.2022 ~01:13 UTC / 3558 ~15:26 LMST

NavCam-L-B 10.8.2022 ~01:05 UTC / 3558 ~15:18 LMST |
|
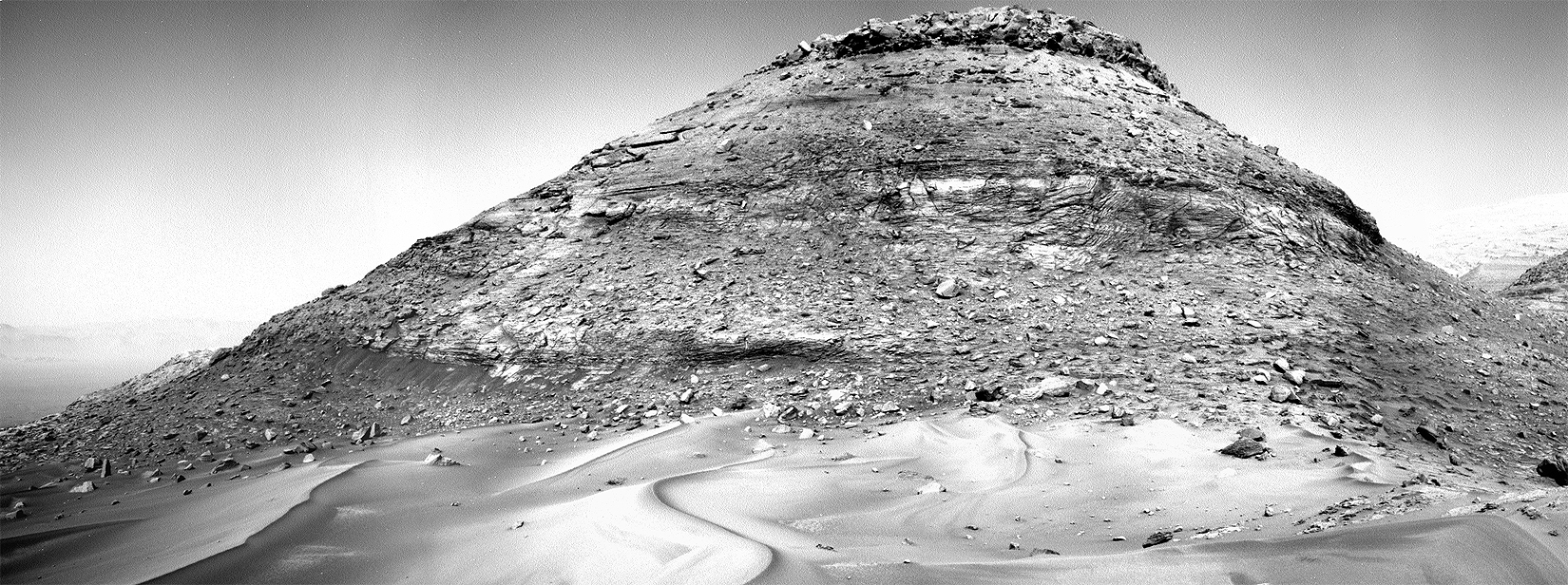
Pohled na kopec Deepdale na severozápadní straně soutěsky Paraitepuy Pass. Od místa, kde stojí Curiosity se zvedá do výšky 42 m. Bohužel jenom v černobílém provedení z kamery NavCam, barevné snímky z MastCam Curiosity nepořídila.

Mozaika NavCam-L-B 10.8.2022 01:04 UTC / 3558 15:17 LMST
[upraveno 10.8.2022 22:13] |
|
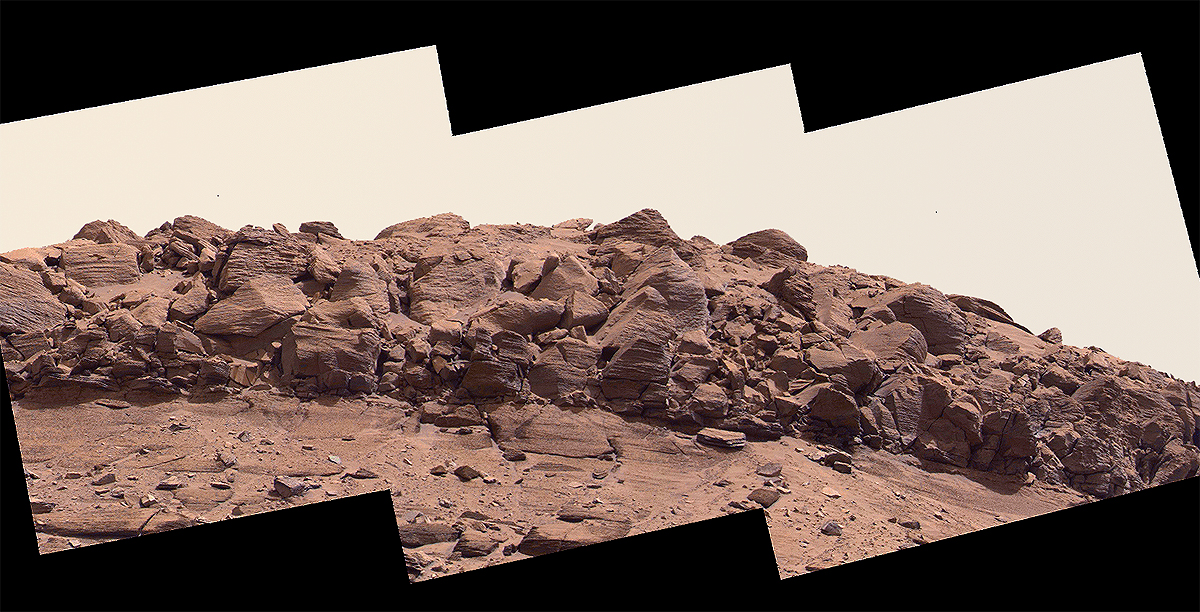
Pohled na kamenitý vršek kopce Deepdale pravou kamerou MastCam (100 mm)

9.8.2022 21:58 UTC / 3558 12:15 LMST |