| 26.7.2012 - 17:20 - david | |
|
| 10,5 dne do přistání a necelých 3.3 mil.km od Marsu. |
| 26.7.2012 - 18:22 - Jan Toman | |
|
When will we see Curiosity's first images?
http://www.planetary.org/blogs/emily-lakdawalla/2012/07231608-curiosity-first-images.html |
|
ESA potvrdila, že jějí Mars Express bude 6.8. na svém místě a jako záloha MRO provede záznam a pozdější odvysílání všech zachycených telemetrických dat z EDL fáze letu MSL.
ME bude "na příjmu" od 5:10 do 5:38 GMT (přistíní se očekává 5:31 GMT).
Poté natočí své antény k Zemi a odvysílá záznamy, které má zachytit 35 m anténa v australské New Norcia, která vše hned přepošle do NASA. To by mělo být v 6:40 GMT.
http://www.esa.int/SPECIALS/Mars_Express/SEMJBLPXV4H_0.html |
|
Dnes (T -8 dní) má proběhnout čtvrtý korekční manévr TCM-4. Bude to prozatím ten nejkratší zážeh, respektive dva, v celkové délce 7 s.
Od té chvíle bude přelet sondy ve fázi Final Approach - konečné přiblížení, zhruba 2 mil km od Marsu. Do cíle bude zbývat překonat posledních 15 mil km.
V plánu jsou ještě další 1 až 2 zážehy (podle potřeby) a to:
TCM-5 v čase T -2 dny (4.8.)
TCM-6 v čase T -9 hod (5.8.)
[Upraveno 28.7.2012 pospa] |
|
Jeden velmi pěkný 3D anaglyf kráteru Gale v rozumném rozlišení.
(sever je vpravo)
http://www.geoinf.fu-berlin.de/eng/projects/mars/preleases/mosaic/008/fullres/008-20111017-mosaic-6-an-01-GaleCrater.jpg
Přistávací oblast je vybraná perfektně - plochá, rovinatá část dna na severovýchodním úpatí středové hory.
Ala pak ta hora - strmé svahy, hluboké průrvy, rozbrázděný terén - to si řidiči roveru smlsnou.
O vědcích nemluvě; ti to místo vybírali 5 let. |
|
citace:
Jeden velmi pěkný 3D anaglyf kráteru Gale v rozumném rozlišení.
(sever je vpravo)
http://www.geoinf.fu-berlin.de/eng/projects/mars/preleases/mosaic/008/fullres/008-20111017-mosaic-6-an-01-GaleCrater.jpg
super je to vďaka vďaka ____________________
Per aspera ad astra - 42 |
|
"strmé svahy, hluboké průrvy, rozbrázděný terén "
Doufám, že se díky chybě při přistání nedostane právě sem (nevím jak je to daleko) - jestli by to pak samo zvládlo přistání zde vůbec.
Případně by se při přistávání sem mohl někam zapíchnout - prostě se zastrčit do nějaké skalní rozsedliny a trčet kolečkama ve vzduchu.
Je možné úspěšné přistání i do tohoto terénu ? |
| 29.7.2012 - 18:22 - david | |
|
| Aby rover nesměřoval do nevhodného místa bude palubní počítač vyhodnocovat snímky sestupové kamery a vytvoří 3D model přistávací plochy.Z toho plyne, že je sonda schopna při přistávání " vybírat bod přistání" asi jako Armstrong při přistávání A-11, a obdobně manévrovat. |
| 29.7.2012 - 20:48 - Machi | |
|
"Co impakty (bez stopy vyvržené hmoty)?"
Vyvržená hmota je zanesena prachem.
"Co tý sypné uhly? Asi to přehnali v programu z osou Y."
Spíše s osou Z. Vertikální měřítko je u podobných anaglyfů téměř vždy větší, než odpovídá skutečnosti. To souvisí už s tím, jaké jsou úhly mezi jednotlivými kanály kamery HRSC (z jejichž snímků byl tento obrázek vytvořen). Ostatně jinak bychom měli problém při tak širokém záběru, vidět jakýkoliv nevýraznější terén ve 3D.
Kráter Gale má průměr 154 km a topografické rozdíly v rámci celého obrázku dosahují max. asi 6 km (tzn. pouze ~1/25 průměru kráteru). |
|
citace:
Aby rover nesměřoval do nevhodného místa bude palubní počítač vyhodnocovat snímky sestupové kamery a vytvoří 3D model přistávací plochy.Z toho plyne, že je sonda schopna při přistávání " vybírat bod přistání" asi jako Armstrong při přistávání A-11, a obdobně manévrovat.
Pokud je tomu skutečně tak - tak je to již na opravdu velmi vysoké úrovni a jako pojistka proti letu jinam během sestupu než bylo plánováno - opravdu již dostatečně velká. |
|
citace:
Aby rover nesměřoval do nevhodného místa bude palubní počítač vyhodnocovat snímky sestupové kamery a vytvoří 3D model přistávací plochy.Z toho plyne, že je sonda schopna při přistávání " vybírat bod přistání" asi jako Armstrong při přistávání A-11, a obdobně manévrovat.
A takovou pohádku jste Davide četl kde? Nic z toho, co píšete, totiž není pravda.
1) palubní počítač nebude vyhodnocovat snímky sestupové kamery, ale údaje z inerciální měřicí jednotky IMU s gyroskopy, která bude během průletu atmosférou registrovat odchylky od ideální trajektorie vlivem nestability a lokálních změn atmosféry. Tyto odchylky bude MSL kompenzovat natáčením vektoru vztlaku - prováděním "S" zatáček tak, aby se k původní ideální trajektorii co nejvíce přibližovala.
2) 3D model terénu, ze snímků kamery MARDI, bude vytvořen mnohem později po přistání a to na Zemi. Rozhodně ne během EDL a vůbec ne přímo počítačem sondy - ten bude mít dost jiné práce.
3) sonda rozhodně není schpná manévrovat a "vybírat bod přistání" takovým způsobem jako piloti LM.
Vstup do atmosféry a aerodynamické brždění viz bod 1).
Při klesání na padáku je pak sestup zcela neřízený - závislý na okamžitém stavu atmosféry (hustota, směr a síla větru v různých výškách).
Při klesání pomocí sestupového stupně se k ůdajům z IMU přidají ještě data ze sestupového radaru, ale "pouze" údaje o okamžité výšce, vertikální a horizontální rychlosti pohybu. Počítač se bude snažit dopracovat ke stavu, kdy je horizontální rychlost 0 m/s a vertikální 0,75 m/s. S těmito parametry v módu "sky crane" s roverem dosedne tam, kam to vyjde. Mělo by to být někde uvnitř přistávací elipsy 7 x 20 km.
Žádné aktivní navádění do "ideálního bodu přistání" podle obrazu terénu nebude.
Oproti předchozím misím bude přistávací oblast/elipsa i tak výrazně menší hlavně kvůli řízenému průletu atmosférou - bod 1) a dokonalejší znalosti "počasí" Marsu díky mnohaletému pozorování a měření aktivními i minulými sondami.
Pro srovnání:
MSL 7 x 20 km
MER 12 x 81 km
Phoenix 20 x 100 km
Pathfinder 70 x 200 km
[Upraveno 30.7.2012 pospa] |
| 30.7.2012 - 06:54 - PINKAS J | |
|
| Jedná se tedy jednak o klasickou inerciální navigaci odvozenou od gyroskopů, kde počítač ať už číslicový, nebo jednoúčelový analogový vyhodnocuje odchylky od předem zadané treaktorie a nějakými prostředky (raket. motorky, křidélky nebo natáčením vektoru vztlaku) tyto odchylky koriguje. Tato navigace je navíc doplněna korekcemi dle údajů sestupového radaru. Je to dostatečně fantastické zařízení, než aby ho David musel přebásnit do zázračného řízení podle 3D snímků, snad by mohl vysvětlit, kde to vzal. |
|
Jak jsem si onehda procitaval parametry toho pristavaciho radaru (info jsem mel z interni diskuze na F6FBB convers kanalu ohledne kosmonautiky), tak by to melo byt tak, ze tento vicenasobny radar v C pasmu (5.6GHz/40MHz/puls 60-2100W) ma 6 anten. Kazda antena ma "vlastni TX-DDS/RX-SDR jednotku propojenou do ridiciho CPU pres RS485 tusim 2.6Mbps z anteny"...v podstate na stejnem kmitoctu jen fazove posunute. A prave ty faze jsou dulezite, protoze se live vyhodnocuji. 4 anteny smeruji trochu do boku cca 25st/vertikala, takze CPU vidi i do boku. Pri maximalnim vykonu pri 600m vysky dokaze vyhodnotit kamen o prumeru 8cm (http://www.ok1mjo.com/all/ostatni/space_aircraft/radarove_osahani_satelitu_v_X_a_W_pasmu_WBB-01.ppt) az 100m od stredu primo pod sebou.
Principialne to funguje jako jakasi SFN sit v OFDM/DVB-T nebo MIMO u WiFiny. Ci SDR prijimac nejen ze vyhodnocuje kazdy ze 6-ti prijimacu zvlast co se tyce sily a charakteru signalu (realtimova analyza obalky), ale tez mzikove ujeti faze jednotlivejch 6 signalu. Analyzu provadi hodne FPGA-DSP vykonny CPU a ne jeden, ale 8 na jednu radiojednotku.
K tomu je jeste kamera smerujici dolu kde se obraz realtimove zpracovava a doplnuje celkovou 3D informaci k radarovemu udaji.
Uvidime jestli se po pristani ozve a jestli se ozve v poloze "ne nazadech ci na boku zapadlej do nejake sterbiny".
Az crane splni svoji povinnost, tak by mel "pristat" o 180-600m dal, pokud mozno na "nohy", tedy na rohove vystupky konstrukce. Az ho bude snimat orbitalni dalekohled, tak by to melo vypadat jako pavouk.
Skoda, ze tam neni alespon stacionarni meteostanice+eventualne seismograficka stanice. Misto pro FTV panely a nanofosfatovou Li-Ionku tam je taky 
Uvidime pri pristim letu jestli vyuziji dusledne vseho co tam leti. A mozna stihnou i ty 3D kamery co chtel Cameron.
Kazdopadne uz z tohodle roveru bude chtit vytezit maximum, tak se tesim na prvni doku film.
Ale porad schazi alespon 2 multitelco retlanslacni druzice pro nonstop prenos z povrchu k Zemi.
Mozna tu funkci zvladne Amsat P5A http://www.ticket-to-mars.org/.
Je domluva, ze bude slouzit jako retlanslacka UHF spolu s vedeckym nacinnim na palube na orbite, ale soucasne bude slouzit pro telko amatersky provoz na Marsu.
Jako HAM prevadec, majak, letajici BBSka okolo Marsu s moznosti FS stahovani palubnich dat a vedeckych dat.
Staci na to uz 12m parabola kde je LNA chlazen tekutym dusikem kvuli sumu.
To by zrucnejsi prumyslovky s vhodnym mistem pro umisteni anteny mohli zvladnout.
http://www.qsl.net/oe5jfl/index.html
Provoz bude jak v profi X pasmu pro DSN sit (8400-8450MHz), tak i v X-HAM pasmu (10450-10500MHz) a mozna i v Ka HAM pasmu (24000-24048MHz pro uzkopasmove xPSK-EME-JST modulace). Technicky by bylo nejlepsi Ka pasmo, protoze pri stejnem prumeru TX paraboly je vyssi zisk nez v X pasmu.
Prumer paraboly sondy je 3m.
Zisk na profi X pasmu 8.4GHz = 45.4dBi.
Zisk na HAM X pasmu 10.5GHz = 47.4dBi.
Zisk na HAM Ka pasmu 24.04GHz = 54.6dBi.
Vykon TWT elektronky PA linearu je 200W (umi az 400W, ale aby vydrzela alespon 10let zivotnosti druzice, tak se nebude tolik "hnat", protoze jako vsechny elektronky....starnou...upalujou se jim "diry" na G).
Takze max EIRP je na profi X pasmu 97dBm = 5011873W EIRP = 5MW EIRP.
V HAM X pasmu to je 8MW EIRP a v HAM Ka pasmu to je 50MW EIRP.
Docela velke rozdili jen zmenou kmitoctu pri stejne parabole 5/8/50MW EIRP.
Proto odhaduji, ze tech 24GHz projde k Zemi nejlepe. Problem je, ze je to kmitocet haklivej na atmosferu....vodu/vlchkost/mraky/dest/snich.
Takze nejlepsi prijem bude nekde na horach. Vzit skladaci 2m parabolu pro 24GHz sebou do lanovky na Lomnicky stit, tak pri bezoblacnem slunecnem dni ten signal urcite chytnete.
Ano, to je ten rozdil prumeru parabol... pro HAM X pasmo je treba 12m parabola s LNB chlazenym v tekutem dusiku a pro HAM Ka pasmo je treba min 160paraboly s jakostnim LNB za pokojove teploty.
Taky se da vypustit balon kde na 300m dlouhe snure je plosina s 90cm parabolou a rotatorem, pochopitelne LNB v tekutem dusiku.
Seskupeni skol s Akademii Ved by tohlo mohlo udelat s pravidelnyma vzletama 2x do roka. Prineslo by to zpoustu vedeckych udaju. Pri sneseni na zem by se vyuzil riditelnej kridlo-padak rizenej servomechanismama z GPSky a pozicnima udajema pro vhodna mista k pristani mimo silnice, lesy, stozary a vedeni VN a mimo leteckych koridoru.
Vedecky by to bylo zajimave jak se chova atmosfera na vysokych MW pasmech, tak trochu lepsi ALMA v jizni Americe.
V Ondrejove a Panske vsi by se urcite zprovoznily 25m paraboly pro trvalej provoz v synchronni spojovaci siti s P5A stejne jako za Apolla by si GTW prehazovali okna jak se Zeme otaci.
Ale popravde se drive dockame temer zaplaceneho projektu Amsat P3E na GEO draze pro trvale spojeni vsech kontinentu (celkove by melo byt 2 nebo 3 tyto druzice pro trvalej provoz HAM sat a to i mezi satama na vnitrnich linkovacich linearnich kmitoctech).
Takze napriklad by to bylo tak, ze na dw link oblast 1stW 10450.000-10450.100MHz (sirka 100kHz pro up 1.3GHz v EU-Africe-zapadni Asii)/dw 10.4GHz SSB), ale po prolinkovani z druhe druzice nad USA a Pacifikem by to bylo dal 10450.200-10450.300MHz (sirka 100kHz pro up 1.3GHz v Severni/Jizni Amerika + Oceanie az k Japonsku a Zelandu), procemz tehle 100kHz se linearne linkuje (analog sirokej 100kHz) na 48GHz mezi GEO HAM satama P3E. Takze posledni sat nad Australii/Asii by na tom EU 1stW byl k nalezeni na kmitoctech 10450.400-10450.500MHz, kde tech 100kHz jde z Australske druzice na 48GHz linearne analogove na tu Evropskou na 1stW.
DW kmitocty jsou jasne prvnich 100kHz je mistni polokoule na 1stW, druhych 100kHz je Amerika-Oceanie a posledni je 100kHz z Australie-Asie-Indicky ocean. Uplinky na 1.3GHz by byli stejne posunute...chci mluvit s Evropanama 1260.000-1260.100MHz SSB uplink, chci mluvit s Havaji, tak uplink je 1260.200-1260.300MHz SSB uplink a kdyz chci mluvit s nekym z Indie, tak uplink dam 1260.500-1260.600MHz SSB.
Pasmo 1.3GHz (23cm) ma Amsat rozsah 1260-1270MHz, tedy 10MHz sire a cele 23cm pasmo je v rozsahu 1240-1300MHz, tedy 60MHz sire.
A jeste jednou zopakuji, ze dw na 10GHz Amsat je 10450-10500MHz, cele 10GHz HAM pasmo je 10000-10500MHz, tedy 500MHz sire.
Predpoklada se, ze prolinkovani mezi druzicema bude v HAM pasmu 48GHz, tedy 47088-47090MHz, tedy sirka 2MHz, celkove je HAM pasmo 48GHz v rozsahu 47000-47200MHz, tedy sirka 200MHz.
Vse najdete na http://www.ok1mjo.com/all/ostatni/HAM/iaru_handbook_6-00.pdf.
[Upraveno 30.7.2012 -=RYS=-] |
| 30.7.2012 - 07:03 - PINKAS J | |
|
| Ještě by mne zajímalo, zda po poslední korekci dráhy při letu k Marsu, se může zadat definitivní program sestupové dráhy se zahrnutím zbývající odchylky (pokud není nulová), nebo tento sestupový program je pevný. |
|
4x PEROM 28LV640 = 32MB FLASH/PEROM pro hlavni fw (2x LV640 je hlavni a druhejch 2x LV640 je zaloha kdyz by se nepovedlo upgrade fw).
Cili vlastne 2x 16MB. 16MB binarka je hlavni fw pro radar.
4x 24LC512 je 2x 128kb EEPROM, kde druha je zaloha prvniho.
Tudiz je zde 128kb binarky, ktere slouzi pro live zmenu parametru.
Takze sestupovy program lze (zadava se algoritmus) zadavat behem preletu a naposledy 40 minut pred vstupem do atmosfery.
V pripade nouze, kdyz se po odeslani techto 40minutovych dat zjisti zavazna zavada, tak lze jeste zaslat korektni udaj s preambuli s nejvyssi nouzovou prioritou, jinak by to MSL uz neprijal a jel by podle poslednich dat.
Technicky je moznost zaslat data tak, aby je MSL prijal nejpozdeji 5 minut pred vstupem do atmosfery. To vsak musi byt ta nouzova data s nejvyssi nouzovou prioritou. Jestli mi pamet slouzi kdyz jsem to cetl z te diskuze, tak deathline time RX palubniho pocitace je tech 5 minut pred vstupem do atmosfery. Bezne zadavani deathline je tech 40 minut, aby se vcas vratilo ARQ potvrzeni o prijeti dat a odeslani potvrzeni o zmene programu v EEPROM/RAM a ze CPU jede podle techto poslednich novych dat.
Po odhozeni horniho stitu s padakem se aktivuje tonovej MFSK vysilac, kde mezi prvnima tonama je potvrzeni prijeti korekci programu/zahrnuti techto dat do RAMky a nabeh sw podle techto poslednich nouzovych instrukci.
Chtelo by to VPNku k radioteleskopu.
http://www.mpifr-bonn.mpg.de/effelsberg/webcam
Jsem tajne doufal, ze spustej web monitorovani a to ASCII textu vyhodnocovani na bocni listu neco jako tohle:
http://websdr.camras.nl:8901/
Asi pred mesicem tam dali prijimac na 8442MHz a byl videl preletovej majak MSL.
MRO na orbite je slyset na 1m parabole takto:
http://www.uhf-satcom.com/amateurdsn/mro/
Ale ty tony na 400MHz/15W (zvysenej vykon..kratkodobe), na to je treba minimalne 40m parabolu a to je na hranici citelnosti.
Idealni je 70-100m parabola.
[Upraveno 30.7.2012 -=RYS=-] |
|
Předminulý týden (16.-20.7.) proběhl postupný reset obou počítačů MSL a nahrání aktualizovaných algoritmů a vstupních dat pro EDL.
Síť radioteleskopů DSN minulý týden velmi intenzivně sledovala přesnou polohu sondy, aby upřesnila údaje o její dráze.
A včerejší korekce dráhy TCM-4 byla skutečně jen velmi malá - zážeh celkem 6 s, změna rychlosti 1 cm/s.
Jak jsem psal nedávno, v plánu jsou ještě (podle potřeby) jeden až dva korekční manévry tak, aby byla sonda navedena co nejpřesněji na sestupovou trajektorii mířící do středu přistávací oblasti.
Poslední korekce dráhy může být až 9 hodin před vstupem do atmosféry.
Nemůžu zatím potvrdit, nebo vyvrátit to co píše RYS, že by se nějaké instrukce, nebo aktualizovaná data posílala ze Země ještě několik málo minut před vstupem do atmosféry, ale z landing press kitu vyplývá, že :
- 10 min před vstupem se oddělí přeletový stupeň, zapne se MELDI
- 9 min před vstupem RCS motorky zastaví rotaci sondy z 2 rpm na 0.
- následuje natočení sondy tepelným štítem ve směru letu - "turn to entry"
- potom odhození 2 x 75 kg závaží pro vychýlení těžiště z osy (stále několik málo minut před vstupem)
Pokud během EDL cokoliv selže u hlavního pčítače RCE-A, přepne se ovládání automaticky na záložní RCE-B, kde běží zjednodušený algoritmus EDL.
Do jaké míry je program v záložním počítači zjednodušený nevím, ale předpokládám, že s ním určitě půjde přistát taky, možná méně přesně, ale s jistotou. |
|
Jen doplním, že včerejší TCM-4 (zážeh celkem 6 s, změna rychlosti 1 cm/s) proběhl kolem 01:00 EDT a posunul bod vstupu do atmosféry o 21 km západně od původního místa, kam sonda směřovala před zážehem. Telemetrie potvrdila, že byl manévr úspěšný a následující dva TCM možná nebudou potřeba.
http://www.jpl.nasa.gov/news/news.cfm?release=2012-220 |
|
citace:
Jen doplním, že včerejší TCM-4 (zážeh celkem 6 s, změna rychlosti 1 cm/s) proběhl kolem 01:00 EDT a posunul bod vstupu do atmosféry o 21 km západně od původního místa, kam sonda směřovala před zážehem. Telemetrie potvrdila, že byl manévr úspěšný a následující dva TCM možná nebudou potřeba.
Pri 6s horení motora je zmena iba 1cm/s? Nie je to nejaká chyba? Takáto zmena pri 6 sekundách sa mi zdá byť zanedbateľná. |
|
citace:
Pri 6s horení motora je zmena iba 1cm/s? Nie je to nejaká chyba?
Pro srovnání:
11.1.2012 : TCM-1 - 59 min zážeh -> dv = 5,5 m/s
26.3.2012 : TCM-2 - 9 min žážeh -> dv = 0,78 m/s
26.6.2012 : TCM-3 - 40 s zážeh -> dv = 0,05 m/s
29.7.2012 : TCM-4 - 6 s zážeh -> dv = 0,01 m/s
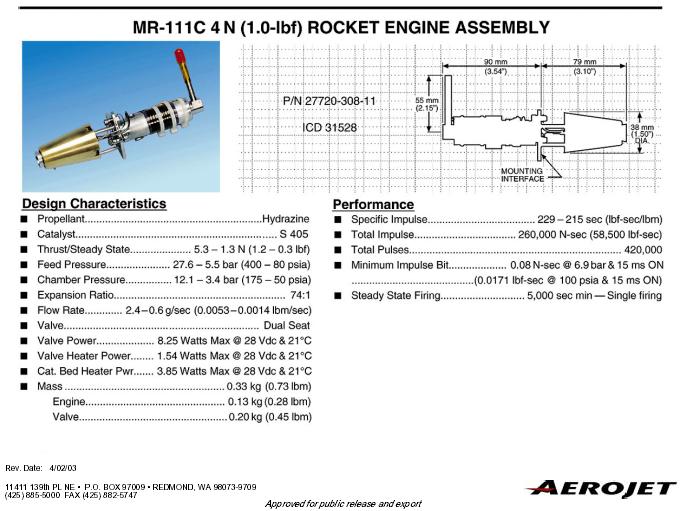
Přičemž celková doba zážehu je vždy součet trvání dílčích impulsů 8 manévrovacích motorků Aerojet MR-111C (tah 5 N každý), umístěných po obvodu přeletového stupně.
Zážehy jsou přerušované, jelikož sonda celou dobu přeletu rotuje (2 rpm).
[Upraveno 30.7.2012 pospa] |
|
Anaglyf středu přistávací oblasti :

http://www.unmannedspaceflight.com/index.php?act=attach&type=post&id=27144
Snímek zachycuje plochu cca 4,5 km na šířku. Není to sice absolutní rovina, ale na místní poměry (dno kráteru) je to velmi dobré.
Je to výřez z většího produktu HiRISE, který zachycuje i úpatí Mt Sharp - budoucí cíl jízdy Curiosity:
http://hirise-pds.lpl.arizona.edu/PDS/EXTRAS/ANAGLYPH/ESP/ORB_024000_024099/ESP_024023_1755_ESP_023957_1755/ESP_024023_1755_ESP_023957_1755_RED.browse.png
[Upraveno 30.7.2012 pospa] |
| 31.7.2012 - 08:27 - david | |
|
citace:
Jedná se tedy jednak o klasickou inerciální navigaci odvozenou od gyroskopů, kde počítač ať už číslicový, nebo jednoúčelový analogový vyhodnocuje odchylky od předem zadané treaktorie a nějakými prostředky (raket. motorky, křidélky nebo natáčením vektoru vztlaku) tyto odchylky koriguje. Tato navigace je navíc doplněna korekcemi dle údajů sestupového radaru. Je to dostatečně fantastické zařízení, než aby ho David musel přebásnit do zázračného řízení podle 3D snímků, snad by mohl vysvětlit, kde to vzal.
Vycházel jsem z premise, že počítač roveru vygeneruje 3D model povrchu při horizontálním pohybu a že dokáže totéž i při pohybu vertikálním.Přistání " na slepo" je jinak vždy riziko,jedna sovětská sondy v pořádku dospěla na Měsíc a při dosednutí " padla na bok ", jak ukázaly americké snímky místa přistání. |
|
citace:
Vycházel jsem z premise, že počítač roveru vygeneruje 3D model povrchu při horizontálním pohybu a že dokáže totéž i při pohybu vertikálním.Přistání " na slepo" je jinak vždy riziko...
Zajímavá úvaha, ale bohužel chybná.
Program pro autonomní navigaci roveru při jízdě vyžaduje:
- zastavit pohyb,
- pořídit stereo pár snímků,
- vytvořit bodovou 3D mapu terénu,
- vypočítat/vybrat nejvhodnější (nejkratší a bezpečnou) trajektorii jízdy ke stanovenému cíli a
- vykonat jízdu po zvolené trase.
U MERů to většinou probíhá tak, že rover průměrně 20 s stojí a pak 10 s jede. Je to dáno nižším výpočetním výkonem počítače a zvolenou úrovní "opatrnosti" software. V pozdějších fázích mise byly voleny i jené taktiky, jako jízda "naslepo", nebo kombinace obou předchozích taktik.
U MSL je výpočetní výkon HW sice vyšší, ale vytvářet 3D mapu terénu pod sebou v reálném čase, to stále za svižného pohybu směrem k "mapě", přitom analyzovat nejvhodnější místa na dosednutí a to nejlepší vybrat,..... hmm, to je prozatím stále z spíš holywood a sci-fi.
Možná u budoucích sond, ale příští pondělí ještě ne. 
Co se týká přistávání naslepo, tak to bych zase tak černě neviděl - srovnání s Lunami před 40-50 lety myslím není na místě.
Dnes má NASA/JPL celou přistávací oblast dokonale zmapovanou v rozlišení 0,25 m/px a výškově 1 m/px. Byly vytvořeny mapy sklonů terénu a vytýčeny nepřístupná místa a oblasti. MSL je navržena tak robusně, že ve vybrané přistávací elipse může dosedednout kdekoli, nepřevrátí se a bude moci z tohoto místa odjet. |
|
Příští dva týdny bude skutečně rušno ... apoň v newsroomu JPL určitě:
(první čas je "news briefing", druhý je TV vysílání, vše PDT)
Aug 2 10:00 Aug 2 17:00 Mission Science Overview News Briefing
Aug 2 11:00 Aug 2 18:00 Mission Engineering Overview News Briefing
Aug 4 09:30 Aug 4 16:30 Prelanding Update EDL Overview News Briefing
Aug 5 09:30 Aug 5 16:30 Final Prelanding Update News Briefing
Aug 5 15:00 Aug 5 22:00 NASA Science News Briefing
Aug 5 20:30~23:00 Aug 6 03:30~06:00 Landing Commentary No. 1
Aug 5 No earlier than 23:15 Aug 6 NET 06:15 Post-landing News Briefing
Aug 6 00:30 Aug 6 07:30 Landing Commentary No. 2
Aug 6 09:00 Aug 6 16:00 Landing Recap News Briefing
Aug 6 16:00 Aug 6 23:00 Possible New Images News Briefing
Aug 7 10:00 Aug 7 17:00 News Briefing
Aug 8 10:00 Aug 8 17:00 News Briefing
Aug 9 10:00 Aug 9 17:00 News Briefing
Aug 10 10:00 Aug 10 17:00 News Briefing
|
| 31.7.2012 - 10:46 - Machi | |
|
citace:
U MSL je výpočetní výkon HW sice vyšší, ale vytvářet 3D mapu terénu pod sebou v reálném čase, to stále za svižného pohybu směrem k "mapě", přitom analyzovat nejvhodnější místa na dosednutí a to nejlepší vybrat,..... hmm, to je prozatím stále z spíš holywood a sci-fi.
Možná u budoucích sond, ale příští pondělí ještě ne.
To by měl právě umět ten evropský měsíční přistávací modul v roce 2018. |
|
Jak velká by mohla být Curiosity vidět na snímcích HiRISE s rozlišením 25 cm/px)?
Přibližně 11-12 px na délku.

http://www.unmannedspaceflight.com/index.php?act=attach&type=post&id=27161
(autor UMSF/walfy) |
|
| ospravedlnujem sa za neznalost hardveru ale je nejaka kamera aj na SkyCrane? Budu nejake zabery visiaceho rovera? Ci to by som chcel privela? |
|
citace:
ospravedlnujem sa za neznalost hardveru ale je nejaka kamera aj na SkyCrane? Budu nejake zabery visiaceho rovera? Ci to by som chcel privela?
afaik, nie ____________________
Per aspera ad astra - 42 |
|
citace:
ospravedlnujem sa za neznalost hardveru ale je nejaka kamera aj na SkyCrane? Budu nejake zabery visiaceho rovera? Ci to by som chcel privela?
Áno, přiveľa...
Na sestupovém stupni žádná kamera není. Není pro to důvod - 17 kamer na roveru je víc než dost.
Myslím, že pro natáčení/focení roveru v podvěsu není ani z inženýrského, ani vědeckého hlediska, žádný důvod. To, jak horní paluba roveru se složenými prvky vypadá, dobře známe už ze Země. A terén pod klesajícím roverem bude bez překážek snímán kamerou MARDI.
Možná se později dočkáme nějaké animace, kdy budou jako pozadí použity reálné záběry z MARDI a nad tím se bude houpat CGI model zavěšené Curiosity, ale spíš jen jako PR. Větší význam takový pohled nemá.
PS: jen taková drobnost na okraj - "sky crane" je název manévru, ne hardwaru. To, pod čím bude rover viset, je "descent stage" = sestupový stupeň.
[Upraveno 31.7.2012 pospa] |
|
"MSL je navržena tak robusně, že ve vybrané přistávací elipse může dosedednout kdekoli, nepřevrátí se a bude moci z tohoto místa odjet. "
To mě právě potěšilo - takže pokud zásadně neselže řízený prulet atmosférou - mělo by to přistát tam dokud to vyjede - tak to je velmi dobrá zpráva. |
|
JPL nám připravila pěkný dárek v podobě aktualizované aplikace Eyes On the Solar System
http://eyes.jpl.nasa.gov/exit.html
Když si u MSL/Curiosity zadáte datum a čas: 2012 Aug 6. 5:10 Universal Time, můžete ve 3D simulaci sledovat celé přistání ... i s pohledem ze sestupového stupně na zavěšený rover |

